力学系として、制御対象として、人間自身も含むヒューマノイドはいまだ謎に包まれた小宇宙です。 昨世紀末から続々と登場しているヒューマノイドロボットですが、真に役に立つ未来のツールにまで進化するために要求されることと、今の段階で達成できていることとの間にはまだまだ大きな隔りがあり、残念ながら現状では研究者にとってすら脅威の存在です。 ダイナミックで、柔軟かつ頑健な制御システムの実現を目指し研鑽しなければならないにもかかわらず、運動能力が低いうちはおとなしくお行儀の良い動きしかさせられないというジレンマ。 もっと小さく軽く、しかも丈夫で信頼性の高いボディが欲しい… UT-μプロジェクトは、このような願いから2002年に立ち上がりました。
ちょうど同時期、産業用の高性能な部品と同じ製法で作られ、身長50cm程度のロボットに塔載できるほどのモータやギアなどが幾つかのメーカから提供され始めていました。 一部の企業が独自の技術で作るのではなく、我々自ら部品を選定し、透過性の高いシステムを設計することが可能な時代になっていたのです。 とはいえ、その躯の小ささから、様々なコンポネントを積み込み、なおかつ十分な剛性と広い可動範囲を同時に確保するのは難しい問題です。 こうした背景を受けて、大学などの研究機関で広く共有される小型ヒューマノイドロボットの開発方法を提示しようというのが、本プロジェクトの一つの狙いです。

|
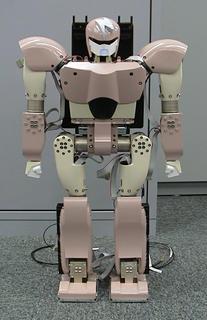
名称: | UT-μ |
| 通称: | mighty | |
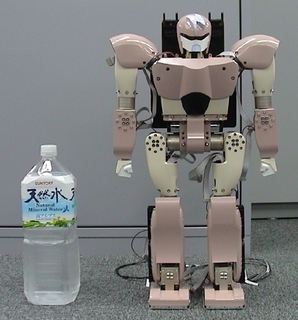
| 全高: | 58[cm] | |
| 総重量: | 6.5[kg] | |
| 主構造材: | AZ91D(マグネシウム合金) | |
| ρ=1.81[kg/cm^3] | ||
| 関節軸数: | 23 | |
| 首部 3(モータなし) | ||
| 腕部 4×2 | ||
| 脚部 6×2 | ||
| 電源: | NiHバッテリ or 外部電源 | |
| 動作電圧: | 24V | |
| メインCPU: | Geode GX1 | |
| アクチュエータ: | コアレスDCモータ | |
| ギア: | ハーモニックドライブ減速器 |
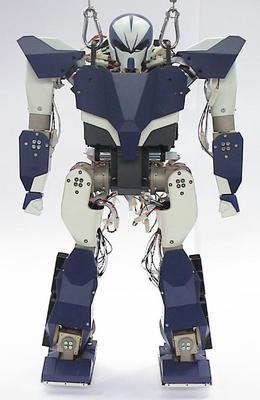
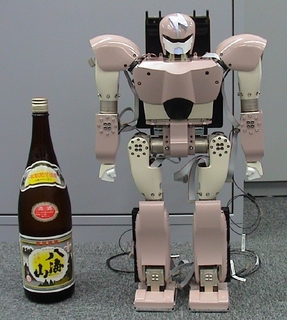
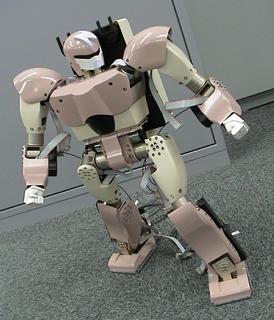
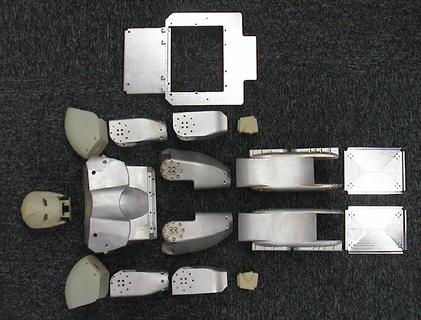
UT-μは、本プロジェクトの1号機として2003年に完成しました。 mightyの愛称は、強く逞しいロボットになって欲しいという願いから付けられたものです。 全関節にmaxon製高出力コアレスDCモータ(4.5W×2:上腕回旋関節、6.5W×4:肩回転関節・肘関節・上腿回旋関節、11W×12:残り全て)とハーモニックドライブシステムズ社製ハーモニックドライブ減速器(減速比100:1)というハイスペックな組み合わせを採用しながら、全高58[cm]、総重量6.5[kg]という小型軽量なボディを実現しました。 その鍵は、二軸直交減速ユニットによりモジュール化された関節構造と、 マグネシウム鋳造による外骨格構造にあります。
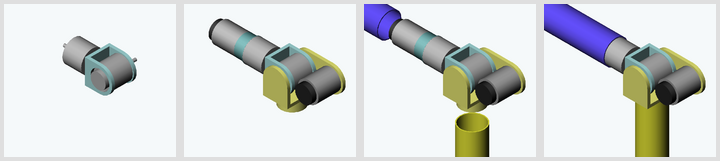
上図が、関節の基本構造を模式的に表したものです。 "人型"の構造上の特徴として、隣接する関節軸の多くが互いに直交しているという点が挙げられます。 ここに着目して、まずコンポネントタイプのハーモニックドライブを二つ直交結合し、ユニット化しました(写真)。 各々の入力軸にモータを取り付け関節モジュールとした後に、それらのモジュールを鋳造により作成した薄肉外殻(t=0.8〜2.0、図では解りやすいように円筒となっています)で繋げ合わせていきます。 このような作り方をすることで、
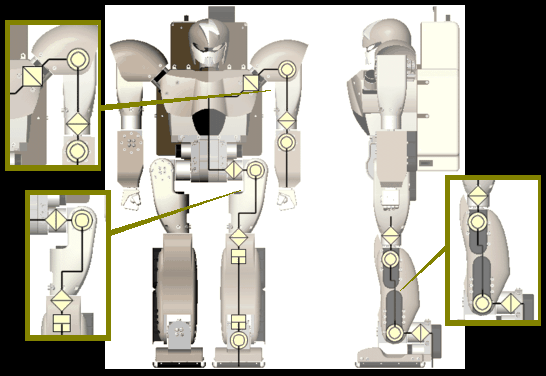
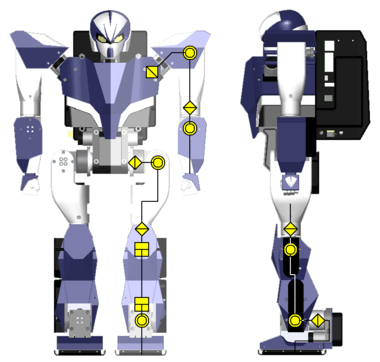
UT-μの一番の特徴は、その関節配置(上図)にあります。
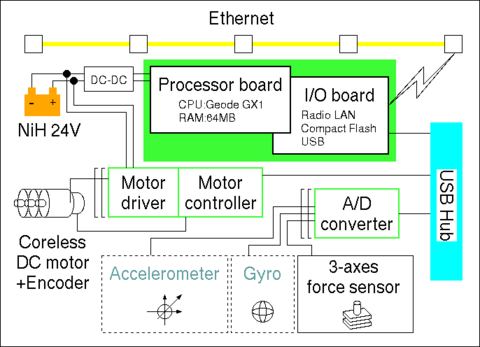
上図に、UT-μのハードウェアシステムを示します。 運動の障害となる外部との接続ケーブルを排除し、制御PC、バッテリーを内蔵した自立システムとなっています。 プロセッサボードはCPUにGeode GX1(National Semiconductor)を塔載したCARD-PCI/GX(EPSON)とI/Oボード(富士通オートメーション)とのユニットを採用しています。 PCは無線LAN(melco)によってイーサネットに接続しており、遠隔オペレーションが可能です。 また小型USB Hub(サンワサプライ)を用いてUSBによる体内LANを構築し、モータコントローラ及びシグナルプロセッサと通信します。 モータ制御には、iMCs01+iMDs03を、A/DコンバータにはiMCs03(全てiXsリサーチ)を用いています。 センサ類は、角速度計測ジャイロMG2及び加速度計MA3(ともにMicrostone)、3軸力センサPicoForce(NITTA、左右足先に各4+左右手首に各1)を塔載しています。
[ギャラリー]
[謝辞]
UT-μの開発は、科学事業振興事業団(JST)戦略的基礎研究推進事業(CREST)領域「脳を創る」の支援を受けました。
|
名称: | UT-μ2 |
| 通称: | magnum | |
| 全高: | 54[cm] | |
| 総重量: | 7.5[kg] | |
| 主構造材: | AZ91D(マグネシウム合金) | |
| ρ=1.81[kg/cm^3] | ||
| 関節軸数: | 23 | |
| 首部 3(モータなし) | ||
| 腕部 4×2 | ||
| 脚部 6×2 | ||
| 電源: | NiHバッテリ or 外部電源 | |
| 動作電圧: | 24V | |
| メインCPU: | Au1100 | |
| アクチュエータ: | コアレスDCモータ | |
| ギア: | ハーモニックドライブ減速器 |
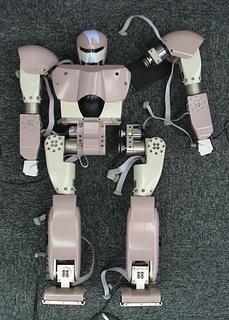
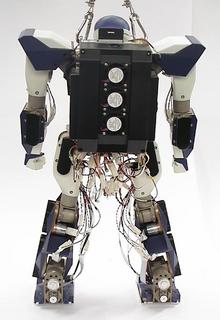
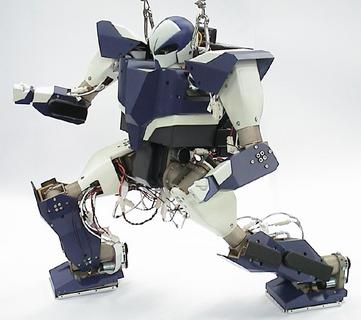
2005年に完成したUT-μ2は、UT-μの改良版です。 mightyよりも更に猛く雄々しくなって欲しいという願いを込め、magnumの愛称で呼ばれます。 曲線を主徴としたUT-μに対し、UT-μ2は直線的なフォルムとなっています。 機構面では、モジュール化関節+マグネシウム鋳造による外骨格構造というUT-μの設計思想をほぼ踏襲しつつ、
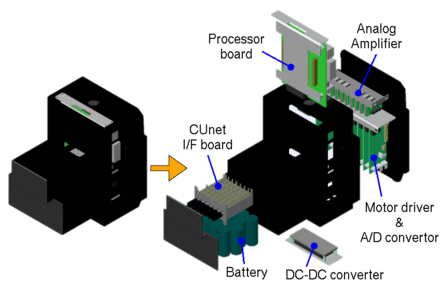
設計に当たって最も改善を必要とされたのは、電装系です。 UT-μシリーズのような小型ロボットでは、電子回路部品や配線などを載せるスペースを十分確保することが難しく、狭い隙間に半ば無理矢理押し込める形になりがちです。 これはロボットのメンテナンスを繁雑にするばかりでなく、回路や配線の損傷も招きます。 アクチュエータやセンサは除くとして、バッテリやDC-DCコンバータを含む電装系を、ボディから独立し単体で動くロボット専用コア制御システムとしてまとめ、その上でボディに塔載してモータ・センサをつないでいくようにすれば、上記の問題は解決される上に、様々なロボットに再利用することも可能になるでしょう。 このようなコンセプトから開発されたのがAnimatoCoreです。


UT-μ2の開発に当たってもう一つ問題になっていたのが、体内ネットワーク用の媒体でした。 USBはプロトコル上の問題から、多数のノードとリアルタイムで通信する手段としては向いていなかったのです。 そこで新たに採用したのがCUnet(StepTechnica)です。 これは、マルチドロップ式に接続したメモリチップを高サイクルで同期させて仮想的な共有メモリを構成し、複数のCPU間通信を可能にするものです。

上図に、UT-μ2のハードウェアシステムを示します。 システムの中核をなす部分が全てAnimatoCoreに含まれているのがお分かりになるでしょう。 センサ類は、角速度計測ジャイロCRS-03(Silicon Sensing Systems)及び加速度計GSX01001T(松久)、3軸力センサPicoForce(NITTA、左右足先に各4+左右手首に各1)を塔載しています。
[ギャラリー]
[謝辞]
UT-μ2の開発は、科学研究費補助金基盤研究(S)(課題番号:15100002)、および新エネルギー・産業技術総合開発機構(NEDO)平成16年度21世紀ロボットチャレンジプログラム「次世代ロボット実用化プロジェクト」の支援を受けました。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}