|
 |

 |
|
中村グループ |
運動パターンの生成と遷移のための力学的情報処理 |
 |
|
「力学的情報処理によるロボットの運動生成と遷移」
引き込み現象を持つ力学系を低次元化された3次元空間で設計し,20自由度のヒューマノイドロボットの運動生成と遷移を行った.
力学系の動きによってロボットの運動が決定されている. |
|
 |
|
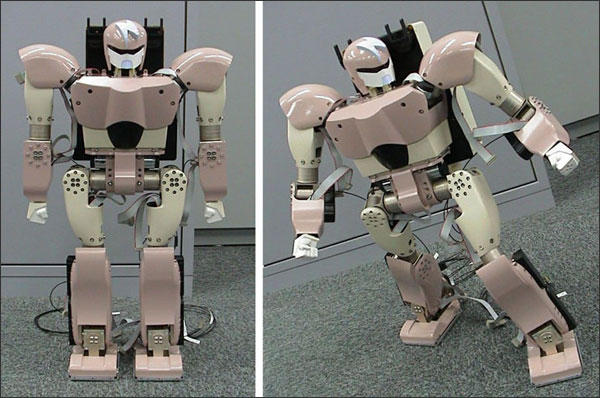
「ヒューマノイドロボットHOAP-1の動き」
力学系から生成された全身運動に基づいて,ヒューマノイドロボットHOAP-1の運動生成を行った. |
|
 |
|
「センサ空間と運動空間の結合によるヒューマノイドロボットの運動生成」
センサ信号に基づいて,センサ空間におけるアトラクタの引き込み領域を変化させ,さらにセンサ空間の情報に基づいて運動空間の力学系を変化させることでロボットの全身運動を生成した. |
|
 |
|
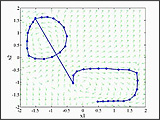
「力学系のオンライン設計」
逐次最小二乗法を用いることで,力学系のオンライン設計を行った.ここでは,忘却係数を設定することで,古いデータを忘れ,新たなデータを記憶するシステムになっている.これにより,ロボットが記憶する運動を変化させることができる. |
|
 |
|
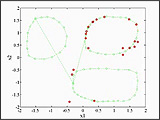
「設計された力学系の動き」
上で設計された力学系の動きを示す.はじめに覚えた閉曲線は忘れられ,後から覚えた閉曲線を良く覚えている. |
|
 |
|
「連続的記号空間の設計によるロボットの全身運動生成」
ロボットの運動を決定する力学系を8次元記号空間の1点として表現した.記号空間(左図,8次元空間のうちの3次元表示)での力学系が運動空間の力学系の構造を決定し,これがロボットの全身運動を生成する. |
 |
|
「バックラッシュクラッチによる零トルク伝達特性の実現」
バックラッシュのギャップ幅を一定に保つことで,零トルク伝達(フリーな運動)を実現した. |
|
 |
|
「バックラッシュクラッチの動き」
上の実験を異なる角度から見たもの.バックラッシュクラッチのギャップ幅が一定に保たれている様子が分かる. |
|
 |
|
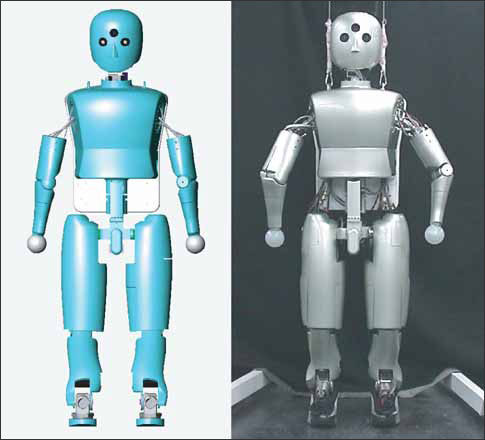
「ヒューマノイドロボットUT-θのスクワット運動」
ヒューマノイドロボットUT-θの基礎実験としてスクワット運動を生成した. |
 |
|
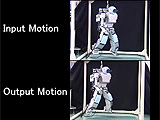
「離散型HMMによるヒューマノイドの行動獲得」
離散型のHMMによって,観察されたヒューマノイド行動(上側)を原始シンボルとして抽象化し,遺伝的アルゴリズムを用いた行動生成アルゴリズムによって原始シンボルから生成された行動パターンをヒューマノイドロボットにおいて実行させた(下側).ほぼ同じ行動が獲得されており,行動模倣
モデルとしての優位性が確かめられた. |
|
 |
|
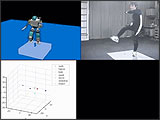
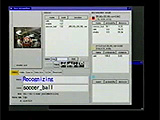
「原始シンボル空間を用いた未知行動のリアルタイム認識と新規行動のリアルタイム生成」
連続分布型HMM,Kullback-Leibler情報量,多次元尺度法によって構成される原始シンボル空間においてリアルタイムの行動認識,行動生成を行った.ムービーの右上が観測に用いた人間の行動.左下がリアルタイムでの認識結果.左上がリアルタイムでの行動生成結果である.「walk」の原始シンボルと「kick」の原始シンボルの間を往復していることが分かる. |
 |
|
高速順動力学計算法による構造可変リンク系のシミュレーション.マウスクリックによりインタラクティブに構造を変化させることができる. |
|
 |
|
力学フィルタにより直進歩行のモーションキャプチャデータから生成された力学的整合性を満たす旋回歩行運動. |
|
 |
|
逆運動学計算を用いた直感的な全身運動生成インタフェースUTPoserの操作画
面.ピン/ドラッグされるリンクを指定するだけで自然な全身運動が生成可能. |
|
 |
|
ビヘイビアキャプチャシステムによる意識行動の同時計測.モーションキャプチャにより被験者の運動,アイマークレコーダにより視線方向と注視点,フォースプレートにより床反力の圧力中心点をそれぞれ計測している. |
|
 |
|
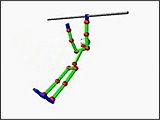
筋骨格モデルの逆動力学計算により計算された,蹴り運動を実現するための筋力.大きな筋力を必要とする筋ほど赤く表示されている. |
|
|
浅田グループ |
|
|
|
「複数の学習器の階層的構築による行動獲得」
同一構造の学習器を複数用いて階層的に構築することによる行動獲得法を提案した.上位層の状態行動空間は下位層で獲得された学習器によって抽象化された状況及び行為によって構成される.先の二つの映像は本手法を単純なナビゲーションタスクとシュート行動を獲得させた時の学習結果を示す. |
|
 |
|
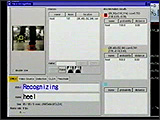
「視覚情報に基づくヒューマノイドのリズム歩行パラメータの強化学習結果」
適切なシュート位置までの移動を強化学習によって獲得した.左下の画像はロボットの視覚(全方位視覚)である.ボールが爪先に,ゴールが中央に見えた時,ロボットに報酬が与えられ,それを最大化するよう歩行のパラメータを学習した結果である. |
|
|
土屋グループ |
 |
|
HOAP−1を用いての歩行実験の様子である.歩幅とデューティー比はそれぞれ3cmと0.50に固定し,下り坂と登り坂を歩行させた実験の様子である. |
|
 |
|
開発した2脚歩行ロボットを用いての歩行実験の様子である.
歩幅は5cmに固定し,それぞれデューティー比が0.50, 0.70の場合と,歩行中,20秒の間に0.70 から0.50 に変化させた場合を順に示す. |
|
|
潮グループ |
 |
|
ハイブリッドステートネットを作成し,各ノードに周期的な行動パターンの力学的表現を割り当てた.得られた軌道にZMP修正を行い,ヒューマノイドロボットHOAP-1に歩
行,スクワット,足踏み,歩行の動作を順に行わせた. |
|
 |
|
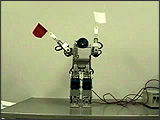
左右の腕にそれぞれモジュール化したステートネットを作成し,時間付きペトリネットを用いて行動計画を行い,干渉なく実行できる組み合わせによってヒューマノイドロボットHOAP-1に両腕の旗振りを行わせた. |
|
|
吉澤グループ |
 |
|
「オンライン線形判別分析(OLDA)に基づく適応的顔認識システム」
判別モードと学習モードを切り替えて,判別対象をシステム稼働中に動的に追加・更新することが可能.提案手法 OLDA により, 大規模計算のやり直しを不要とした. |
|
 |
|
「任意対象パターンの対話的教示が可能な OLDA ベース任意画像パターン認識システム」
OLDA は顔に特化した手法ではないため, 任意の対象パターンを動的に登録できるシステムが構築可能である. |
|
 |
|
「OLDA ベース任意画像パターン認識システムを用いた踵の連続的認識・追跡」
人の歩行ピッチ抽出を行う目的で, 前を行く人の脚の踵の部分を連続的に認識・追跡させた. |
|
|
開発ハードウェア |
中村グループ - ヒューマノイドロボット・デザインと運動性進化 |
| 中村グループ - ヒューマンフィギュアの力学計算と行動計測 |
 |
|
ビヘイビアキャプチャスタジオでのキャプチャ風景.モーションキャプチャシステム,フォースプレート,アイマークレコーダを使用している.右下枠内は筋電位計. |
 |
|
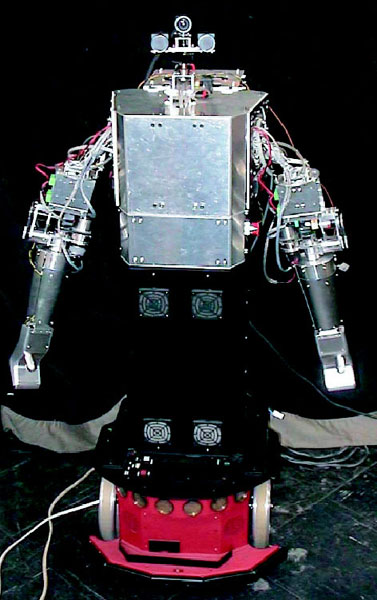
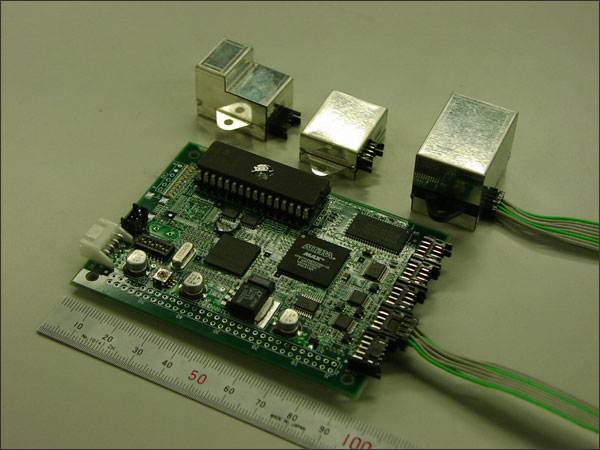
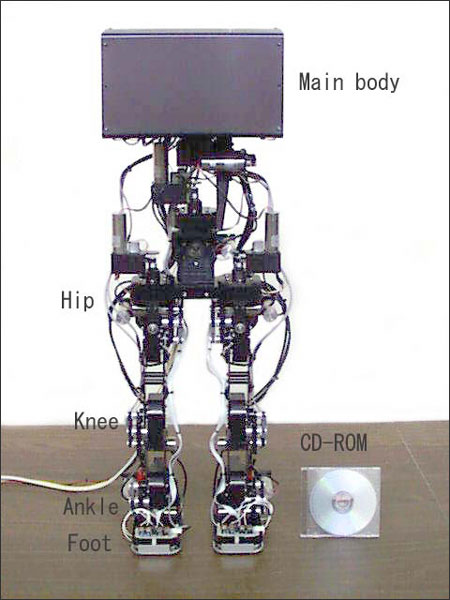
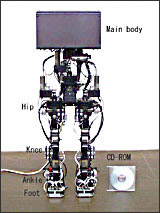
開発した二脚歩行ロボットの前額面写真である.このロボットは6自由度の脚2本と3自由度の胴体から構成されており、全15自由度である.上部胴体内部にコントローラ等電子回路が搭載され,LANにてホストPCと通信を行なう. |
|
 |
|
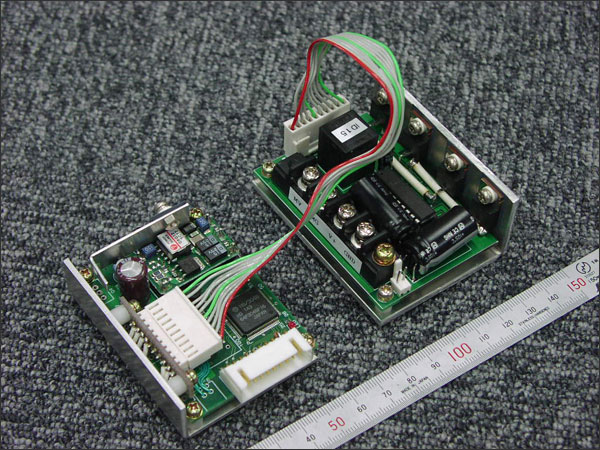
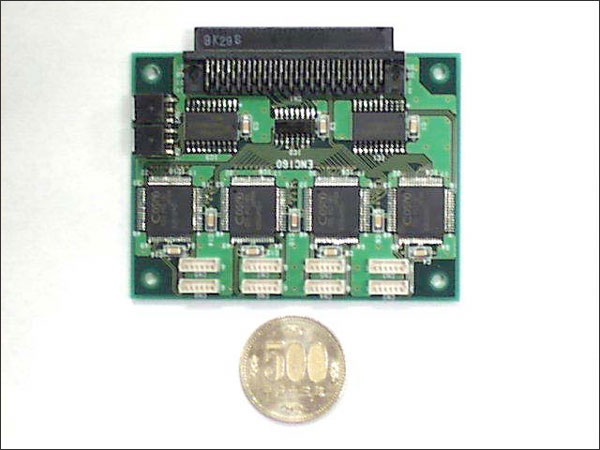
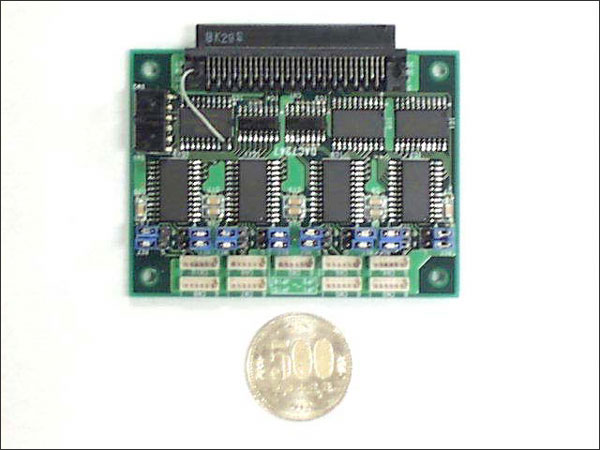
開発した光学エンコーダ用カウンタボードの写真である.このボードは,1枚につき16チャンネルのエンコーダ信号を24ビット分解能にて非同期カウントが可能である.バスはPC104バスサブセットを用いている.ボードのサイズは,80mm×60mmである. |
|
 |
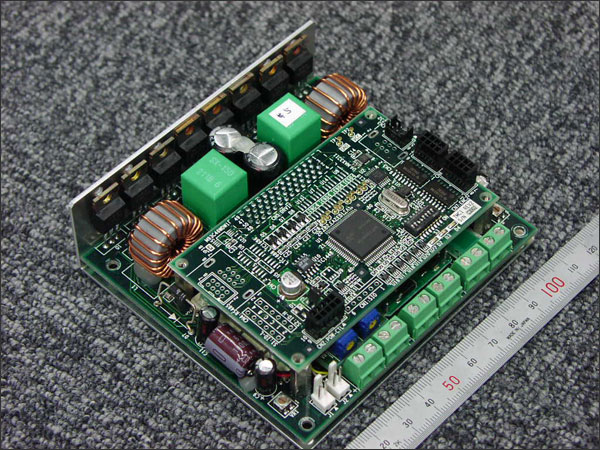
|
開発したD/A変換ボードの写真である.このボードは,1枚につき16チャンネルアナログ信号を12ビット分解能にて非同期出力が可能である.出力レンジは,±5V,0−10Vをチャンネル毎に切替可能である.バスはPC104バスサブセットを用いている.ボードのサイズは,80mm×60mmである. |
|
|

|
 |
|
| この映像をご覧いただくには RealOne Player が必要です。 |
|