|
 |

| Humanoid Robot
Design for Mobility Evolution |
| |
Masafumi Okada*1,Yoshihiko
Nakamura*1*2
*1Univ. of Tokyo,*2CREST
|
Development of mechatoronics technology
produce integration of sensors, actuators and motor drivers, which generates
success mechanical design of the humanod robots. For the higher mobility
acquisition, the more degrees-of-freedom will be helpful. However, it requires
further and harder challenge of integration, and it is not desirable from
the lightweight and miniaturization points of view. In this paper, we focus
on the driving mechanism for humanoid robots. The specific problems raised
in this paper are
|
 |
Joint allocation design that
maximizes the whole body mobility of humanoid robots. |
|
|
Joint transmission design
that switches between the drive and free modes. |
The conventional humanoid robots walk with bending
knee joints. It is for the high controllability of the center of gravity
(COG) and the avoidance of singularity. However, it causes high energy consumption
and requires high power actuators in knee joints.
The current design of transmission of humanoid
robots is not prepared to discuss dynamical coupling between the humanoid
body and the environments. The natural human motion that we see in an elegant
walk or in fine dancing is acquired through the coupling. Clearly, feeling
the gravity and the environmental constraints not only with a specific sensor
like vision but with the whole body dynamics suggests a design principle
of sensory motor system of intelligent machines. Natural motions of humanoid
robots may not be obtained from just imitating human motions. They would
be acquired through the dynamics of their body and the environments including
the gravitation.
In this paper, we develop two mechanisms that
improving the humanoid robot motion. The double spherical joint is six DOF
mechanisms whose axes intersect in one point. By using this mechanism for
humanoid hip joints, the waist joint function is realized without increasing
an actuator. We also propose a joint drive mechanism that can switch between
drive and free modes. The backlash clutch solved the problem adopting a
simple mechanism and a control algorithm. The backlash clutch is integrated
in the knee mechanism of a humanoid robot.
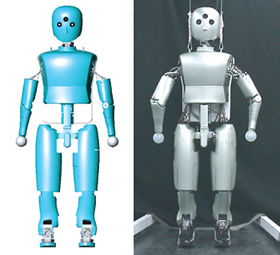
The humanoid robot with the cybernetic shoulder
[1], double spherical joint on the hip joint and the backlash clutch on
the knee joints is developed. The preliminary results of experiments are
to be shown in this paper to discuss the effectiveness of the body mobility.
On the other hand, many of the conventional humanoid
robots lack of mobility at the current stage, so that they can hardly work
against the severity of the real environment. We developed a miniature anthropomorphic
robot which reduces the danger of experiments and has so high performance
that one can feed the results of experiments back to as tall robots as humans.
|
[1] |
M.Okada, Y.Nakamura and S.Hoshino
: Development of the Cybernetic Shoulder -A Three DOF Mechanism that
Imitates Biological Shoulder-Motion -, Proc. of IEEE/RSJ International
Conference on Intelligent Robots and Systems(IROS'99), pp.543-548,
1999. |
|
|

|