|
 |

| Humanoid Walk
Control using Central Pattern Generators with Discontinuous Phase
Change |
| |
Kazuo Tsuchiya*
*1Kyoto University
|
A legged robot is a mechanical system composed of many links through rotational
joints. The legged robot's locomotion is regarded as a rhythmic motion of
a mechanical system with many degrees of freedom. Locomotion control of
the legged robot implies control of such rhythmic motion. In some cases,
a biped robot becomes unstable in attitude during locomotion. This type
of locomotion is called dynamic locomotion.
This research is on the design method of a control system for a biped robot,
with emphasis on the control for dynamic locomotion. Usually, the motion
control of a mechanical system with many degrees of freedom is achieved
by a model-based approach[1]. This kind of control system consists of a
motion plan system and a motion control system. The motion plan system generates
the nominal trajectory of the mechanical system, and the motion control
system controls each joint to realize the nominal trajectory. This type
of control system is neither always robust against disturbances nor able
to adapt to variations in the environment.
There is a way to overcome these difficulties. The method is to modify the
motion plan system. This involves designing the motion plan system as a
dynamical system [2][3]. The nominal angular positions of the joints are
encoded as states of the dynamic system. By inputting the signals of the
sensors, the state of the dynamic system is changed according to the dynamic
variances of the environment. As a result, the nominal locomotion, as well
as the nominal angular position of the joints, are appropriately generated
according to the variations in the environment.
The authors have been developing a control system for a biped robot by applying
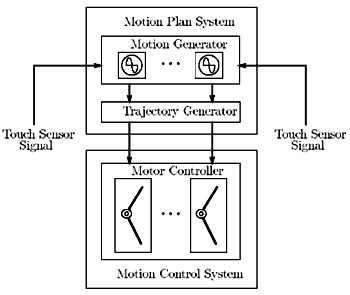
the latter method [4][5]. Our proposed control system is designed as follows.
The motion plan system is composed of a motion generator and a trajectory
generator. The motion generator consists of nonlinear oscillators, each
of which has a stable limit cycle. The nonlinear oscillators have input
signals from the touch sensors equipped at the end of the legs as well as
mutual interactions with each other. As a result, each oscillator tunes
a phase according to the variations in the environment. On the other hand,
the trajectory generator generates the nominal values of the angular position
of the joints as functions of phase of the corresponding oscillator. As
a result, changing a locomotion pattern, the robot with the proposed controller
can walk stably in a dynamic environment.
This report introduces our proposed control system for legged robots using
nonlinear oscillator. As examples of this study, a biped robot is introduced,
and the proposed control system is designed for the legged robot. The efficiency
and performance of our approach are verified through numerical simulations
and hardware experiments.
|
[1] |
An C.H., Atkeson C.G., and
Hollerbach J.M.: Model-based control of a robot manipulator, MIT Press,
1988. |
|
[2] |
Ijspeert A.J., Nakanishi
J. and Schaal S.: Trajectory Formation for Imitation with Nonlinear
Dynamical Systems, Proc. IEEE/RSJ Int Conf on Intelligent Robots and
Systems (IROS 2001), pp.752-757, 2001. |
|
[3] |
Ijspeert A.J., Nakanishi
J. and Schaal S.: Learning Rhythmic Movements by Demonstration using
Nonlinear Oscillators, Proc. IEEE/RSJ Int Conf on Intelligent Robots
and Systems (IROS 2002), pp.958-963, 2002. |
|
[4] |
Tsujita K., Tsuchiya K. and
Onat A.: Adaptive Gait Pattern Control of a Quadruped Locomotion Robot,
Proc. IEEE/RSJ Int Conf on Intelligent Robots and Systems (IROS 2001),
pp.2318-2325, 2001. |
|
[5] |
Tsuchiya K. Aoi S. and Tsujita
K.: Locomotion Control of a Biped Locomotion Robot using Nonlinear
Oscillators, Presented at IEEE/RSJ Int Conf on Intelligent Robots
and Systems (IROS 2003), 2003. |
|
[6] |
Kuramoto Y. : Chemical Oscillations,
Wave and Turbulence, Springer, Berlin, 1984. |
|
|

|