|
 |

| Liapunov Design of Dynamical Information Processing and Transition Control of Motion Patterns |
| |
Toshimitsu
Ushio*1
*1Osaka University
|
Efficient representations of primitive motions of humanoid robots are important
in order to realize various complicated motions. A graphical representation
called a state net is very useful for describing the transitions between
basic positions [1]. In the state net, each static position is described
by a node in a sensory space, and transitions between positions are described
by directed arcs from a current node to the next node. So, both addition
of new motions and modifications of motions are very easy. However, it is
not included to represent periodic motions such as walk.
On the other hand, studies on design of dynamical systems which have a specified
stable limit cycles have been done in nonlinear system theory. Green derived
a constraint function which specifies the limit cycle and proposed a Lyapunov
function based method for design of a desired dynamical system from the
constraint function [2].
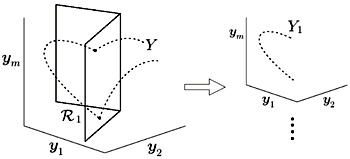
In this research, applying Green's method, we proposed a dynamics based
presentation of periodic motions of humanoid robots [3]. After periodic
sequence data of several primitive motions is reduced to a lower-dimensional
data, we construct a nonlinear dynamical system where the reduced periodic
motion is represented by a stable limit cycle. By experiment using HOAP-I,
we show the effectiveness of the proposed method. Then, we introduced a
hybrid state net, which is an extension of the state net, in order to present
transitions between the primitive motions [4].
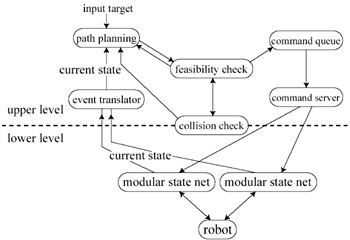
We also proposed a supervisory control system for motion planning of humanoid
robots [5]. The proposed system is hierarchically structured into two levels.
The lower level controls and monitors the robots using modular state nets.
A modular state net is a state net representing motions of parts of the
robots such as arms, legs, and so on, and whole body motions of the robots
are represented by a combination of modular state nets for the parts. The
upper level generates an optimal sequence of motions for user's requirements
using timed Petri nets. A timed Petri net is used as an abstracted model
of the set of all modular state nets, and using discrete event systems theory
and optimal path searching algorithms, we find an optimal motion sequence.
Moreover, applying a reinforcement learning method, we proposed a novel
approach to the fast convergence to an optimal supervisor [6].
Using the proposed methods, we can store many primitive motions of humanoid
robots which lead to realization of very complicated behavior.
|
[1] |
F. Kanehiro, M. Inaba, H.
Inoue, and S. Hirai: Developmental Realization of Whole-Body Humanoid
Behaviors Based on State Net Architecture Containing Error Recovery
Functions, Proc. of the First IEEE-RAS International Conference on
Humanoid Robots, 2000. |
|
[2] |
D.N. Green: Synthesis of
Systems with Periodic Solutions Satisfying V(x)=0, IEEE Transactions
on Circuits and Systems, Vol.31, No.4, pp.317-326, 1984. |
|
[3] |
Masakazu ADACHI, Toshimitsu
USHIO, and Shigeru YAMAMOTO: Application of Lyapunov Function Based
Synthesis of Nonsmooth Limit Cycles to Motion Generation for Humanoid
Robots, Proc. of 2nd International Symposium of Adaptative Motion
of Animals and Machines, SaP-II-4, March, 2003. |
|
[4] |
Hideyuki TAKAHASHI, Keigo
KOBAYASHI, and Toshimitsu USHIO: Generation of Periodic Motion of
Humanoid Robots Using Hybrid State Nets, to appear at 2003 JACC, 2003.(in
Japanese) |
|
[5] |
Keigo KOBAYASHI, Atsushi NAKATANI,
Hudeyuki TAKAHASHI, and Toshimitsu USHIO: Motion Planning for Humanoid
Robots Using Timed Petri Net and Modular State Net, Proc. of 2002
IEEE International Conference on Systems, Man, and Cybernetics, pp.
334-339, October, 2002. |
|
[6] |
Tatsushi YAMASAKI and Toshimitsu
USHIO: Supervisory Control of Partially Observed Discrete Event Systems
based on a Reinforcement Learning, Proc. of 2003 IEEE International
Conference on Systems, Man, and Cybernetics, October, 2003. |
|
|

|