|
 |

| Stochastic
Information Processing that unifies Recognition and Generation of
Motion Patterns -Toward Symbolical Understanding of the Continuous
World- |
| |
Tetsunari
Inamura*1 and Yoshihiko Nakamura*1*2
*1Univ. of Tokyo,*2CREST
|
The purpose of the research is to propose
a novel brain-like information processing framework which can connect motion
patterns and symbols. We have focused on two knowledge: "Mimesis Theory"
and "Mirror Neurons" for the purpose. The discovery of mirror
neurons [1] have been a notable topic of brain science which fire when the
subject observes a specific behavior and also fire when the subject start
to act the same behavior. Furthermore, it is located on Broka's area which
has close relationship with language management. The fact suggests that
the behavior recognition process and behavior generation process are combined
as the same information processing scheme, and the scheme is nothing but
a core engine of symbol manipulation ability. Indeed, in Donald's "Mimesis
Theory"[2], it is said that symbol manipulation and communication ability
are founded on the behavior imitation, that is integration of behavior recognition
and generation. We believe that a paradigm can be proposed taking advantage
of the mirror neurons, with considerations of Deacon's contention [3] that
the language and brain had evolved each other.
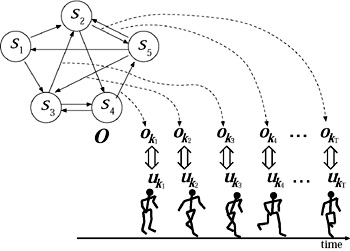
So far, we have proposed a mathematical model
that abstracts the whole body motions as symbols, generates motion patterns
from the symbols, and distinguishes motion patterns based on the symbols.
In other words, it is a functional realization of the mirror neurons and
the mimesis theory. For the integration of abstract, recognition and generation,
the hidden Markov model (HMM) is used. One as observer would view a motion
pattern of the other as the performer, the observer acquires a symbol of
the motion pattern. He recognizes similar motion patterns and even generates
it by himself. We call the HMM as proto-symbol representation [4].
Symbols are required to represent similarity
or difference between each symbol. We have extended our HMM based method
in order to express a geometric proto-symbol space which contains relative
distance information among proto-symbols [5], using Kullback-Leibler information
for calculating pseudo distance and Multi Dimensional Scaling for space
construction. Using the geometric proto-symbol space, the model can recognize
unknown behaviors and generate novel behaviors using combination of proto-symbols
by known proto-symbols, that is geometric proto-symbol manipulation in the
proto-symbol space.
|
[1] |
V.Gallese and A.Goldman:
Mirror neurons and the simulation theory of mind-reading, Trends in
Cognitive Sciences, Vol.2, No.12, pp. 493-501, 1998. |
|
[2] |
Merlin Donald: Origins
of the Modern Mind, Harvard University Press, Cambridge, 1991. |
|
[3] |
Terrence W. Deacon: The
symbolic species, W.W. Norton & Company. Inc., 1997. |
|
[4] |
Tetsunari Inamura, Iwaki
Toshima, and Yoshihiko Nakamura: Acquisition and embodiment of motion
elements in closed mimesis loop, Proc. of IEEE Int'l Conf. on Robotics
& Automation, pp. 1539-1544, 2002. |
|
[5] |
Tetsunari Inamura, Hiroaki
Tanie, and Yoshihiko Nakamura: From stochastic motion generation and
recognition to geometric symbol development and manipulation, International
Conference on Humanoid Robots, 2003. |
|
|

|