|
 |

| Dynamical
Information Processing for Motion Pattern Generation and Transition |
| |
Masafumi Okada*1
and Yoshihiko Nakamura*1*2
*1Univ. of Tokyo,*2CREST
|
So far, robot motions are designed from
the motion generation and motion decision points of view. The robot motions
are represented by the symbols such as 'walk' or 'run', and the motion decision
system is designed by a discrete system that obtains the optimal sequence
of the symbols using the sensor signals. The motion generation system is
designed as the robust controller on the assumption of the existence of
the reference trajectory for the robot motion. On the other hand, Freeman[1,2]
shows the experimental result of the order for the known smell and the chaos
for the unknown smell in the rabbit olfactory perception, and shows the
close relationship between the nonlinear dynamical phenomenon and intelligence.
Tsuda shows the effectiveness of the chaotic dynamics for learning and calls
the phenomenon that the human brain transits some attractors as 'chaotic
itinerancy' [3].
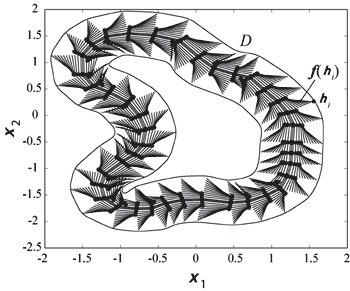
In this research, we design the dynamics-based
information processing system for humanoid robots using dynamical phenomenon.
The whole body motion of the humanoid robot is represented by a closed curve
line in N dimensional space, and we design a nonlinear dynamics that has
a limit cyclic on this line.
The results of this research are listed as follows.
|
1. |
Since the humanoid robot
has many degrees-of-freedom, it needs a large amount of calculation
to deal with the whole body motion. In this research, we propose the
reduction method for the humanoid robot's whole body motion using
the correlation of the joint angle motion. |
|
2. |
By proposing the design method
of the nonlinear dynamics that has an attractor in N dimensional
space, we design the brain-like information processing system using
the dynamics. |
|
3. |
We design the dynamics-based
information processing system that realizes the humanoid robot's smooth
motion transition based on the sensor signal. |
|
4. |
By the hierarchical configuration
of the dynamical system, we design the continuous symbol space that
decides the humanoid motion. |
|
[1] |
W.Freeman and W.Schneider
: Changes in Spatial Patterns of Rabbit Olfactory EEG with Conditioning
to Odors, Psychophysiology, Vol.19, pp.44-56, 1982. |
|
[2] |
Y.Yao and W.J.Freeman : Model
of Biological Pattern Recognition with Spatially Chaotic Dynamics,
Neural Networks, Vol.3, pp.153-160, 1990. |
|
[3] |
I. Tsuda : Chaotic itinerancy
as a dynamical basis of Hermeneutics in brain and mind, World Futures,
31, pp.105-122, 1991. |
|
|

|