|
 |

| Dynamics Computation
and Behavior Capture of Human Figures |
| |
Katsu Yamane*1,Yoshihiko
Nakamura*1*2
*1Univ. of Tokyo,*2CREST
|
Humanoid has less actuators than its
movable degrees of freedom (DOF) which includes the unactuated six DOF of
the translation and rotation of the pelvis. Therefore, we may not be able
to find a sequence of actuator inputs to achieve a motion generated without
considering the dynamics. In addition, it is very difficult to adapt a motion
to various situations because common humanoids have more than 20 DOF and
practical motion generation techniques are limited to motion capture or
numerical optimization.
In order to study brain-like information processing,
it is important to measure or compute the sensor information such as vision
and somatosensory information, as well as the motion data. Commercial motion
capture systems can only capture the motion of subjects which are typically
modeled as kinematic chains with similar complexity as humanoids. In addition,
it is very difficult to add a new hardware or improve the software of commercial
systems.
In this research, we developed the following methods and systems:
|
 |
Parallel efficient dynamics
computation of human figures: This method not only serves as the basis
for motion generation considering dynamics, but also improves the
efficiency of the computations of simulating and controlling motions
of humanoids. |
|
|
Motion generation of human
figures considering physical consistency: This method, called dynamics
filter, can generated motions that are both physically consistent
and human-like by modifying motion capture data. |
|
|
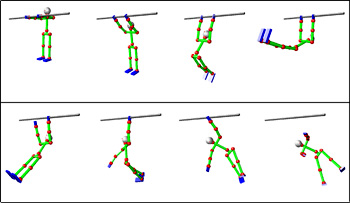
Intuitive motion generation
using inverse kinematics: This method is capable of generating whole-body
motions of human figures by only specifying several fixed links and
the trajectory of a link. This is enabled by extending conventional
algorithm for inverse kinematics. |
|
|
Behavior capture system:
We combined our original motion capture system with other sensors
including force plate and gaze direction sensor. |
|
|
Dynamics computation of musculoskeletal
human model: We can compute the somatosensory information by developing
the methods for computing the dynamics of human model composed of
bones, muscles, and tendons. |
The techniques for dynamics simulation, motion
generation, and motion / sensory information measurement for human figures
developed in research would serve as the basis for humanoid and cognitive
science. In fact, some of these techniques have been adopted by other research
groups in the project. Some are also applied to software packages for humanoid
simulators and CG animation.
The extension to musculoskeletal human model
would have applications beyond humanoids. Potential applications include
investigation of human motion control mechanism using somatosensory information,
development of new human-robot interface, and applications to medical and
sport science.
|
|

|