|
 |

 |
|
身体運動コーパスの構築 |
|
 |
|
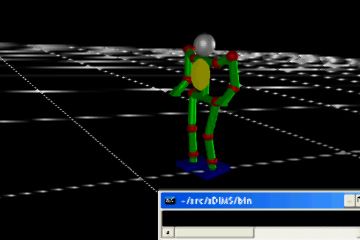
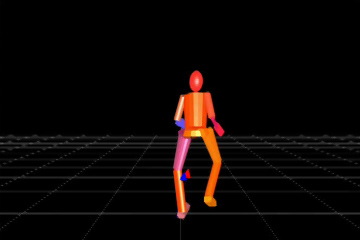
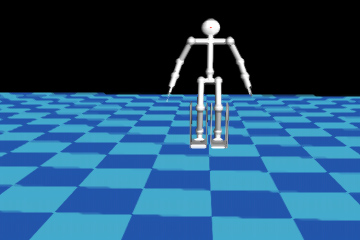
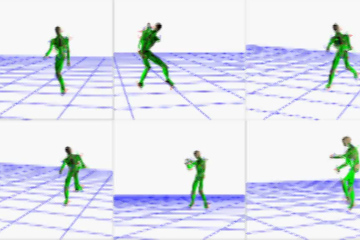
運動のセグメンテーションと学習による運動予測 (クリスタル・ボール)
|
|
|
|
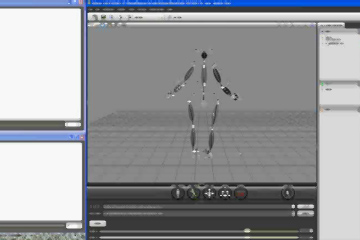
人間の深部身体感覚の推定とその構造化 |
|
 |
|
神経筋骨格モデルによる体性反射(膝蓋腱反射)のシミュレーション
|
|
 |
|
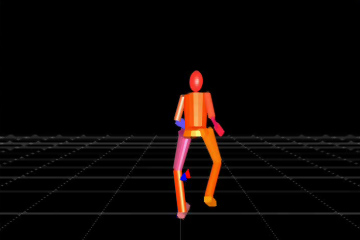
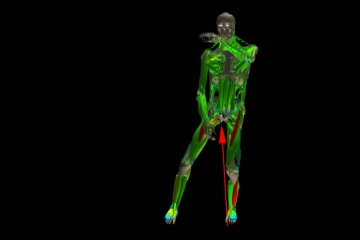
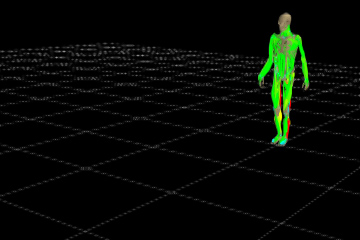
筋張力のリアルタイム推定・可視化 (マジック・ミラー)
|
|
|
自己とモノ,自己と他者の間の関係性コーパスの構築 |
|
 |
|
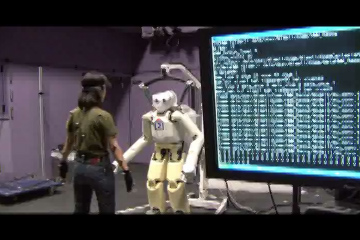
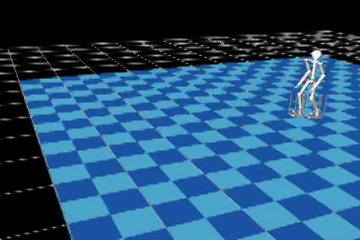
HMMを用いたヒューマノイドロボットの運動認識・生成と人間とのコミュニケーション
|
|
|
自然言語の情報処理と身体運動の情報処理の融合 |
|
|
|
言語シンボルと運動シンボルの関連付けによる運動の言語的理解
|
|
|
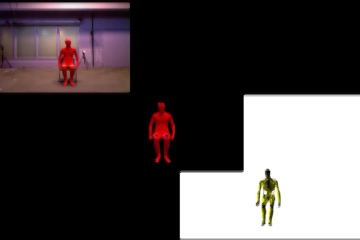
自然言語と身体運動感覚でコミュニケーションするヒューマノイドの開発 |
|
 |
|
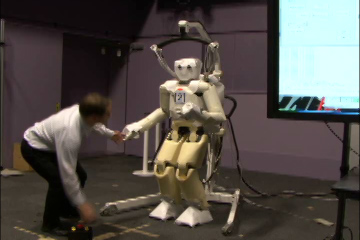
トルクセンサによる関節の力制御
|
|
 |
|
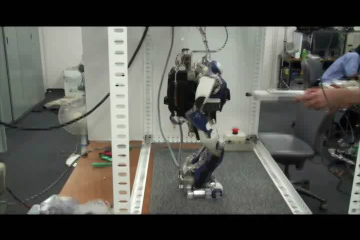
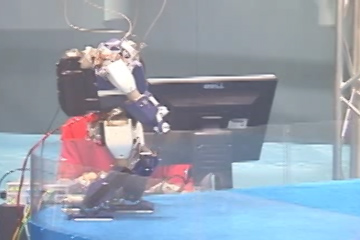
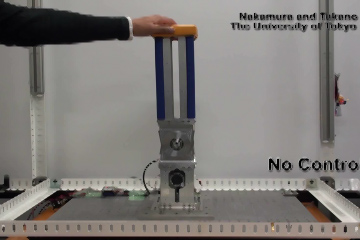
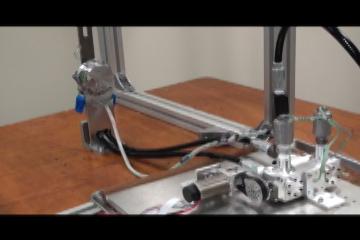
油圧駆動を用いた膝関節支援装置
|
|
|
論文発表ムービークリップ |
|
|
| 2008年度 |
|
 |
|
D. Kulic, W. Takano and Y. Nakamura, Combining Automated On-Line Segmentation and Incremental Clustering for Whole Body Motions, IEEE International Conference on Robotics and Automation, 2008.5.19-23, California, USA, |
|
 |
|
クリッチ,今川,中村, 全身運動のオンライン抽象化と可視化, 第14回ロボティクスシンポジア, 2009.3.16-17, 北海道, |
|
 |
|
高野,中村, 運動パターンの記号化と言語の統合に基づく統計的推論処理, 第14回ロボティクスシンポジア, 2009.3.16-17, 北海道, |
|
 |
|
A. Murai, K. Yamane, and Y. Nakamura, Modeling and Identification of Human Neuromusculoskeletal Network Based on Biomechanical Property of Muscle, The 30th IEEE EMBS Annual International Conference, 2008.8.20-24, British Columbia, Canada, |
|
 |
|
D. Kulic, D. Lee, C. Ott and Y. Nakamura, Incremental Learning of Full Body Motion Primitives for Humanoid Robots, IEEE-RAS International Conference on Humanoid Robots, 2008.12.1-3, Daejeon, Korea, |
|
 |
|
W. Takano and Y. Nakamura, Integrating Whole Body Motion Primitives and Natural language for Humanoid Robots, IEEE-RAS International Conference on Humanoid Robots, 2008, 2008.12.1-3, Daejeon, Korea, |
|
 |
|
K. Ayusawa, G. Venture, Y. Nakamura, Identification of Humanoid Robots Dynamics Using Floating-base Motion Dynamics", IEEE/Int. Conf. on Intelligent Robot System, pp 2854-2859, 2008 |
|
 |
|
D. Lee, D. Kulic and Y. Nakamura, Missing Motion Data Recovery using Factorial Hidden Markov Models IEEE International Conference on Robotics and Automation, pp. 1722 - 1728, 2008. |
|
|
| 2009年度 |
|
 |
|
Gentiane Venture, Ko Ayusawa, Yoshihiko Nakamura, A Numerical Method for Choosing Motions with Optimal Excitation Properties for Identification of Biped Dynamics - An Application to Human, IEEE International Conference on Robotics and Automation, 2009.5.12-17, Kobe, Japan, |
|
 |
|
Wataru Takano and Yoshihiko Nakamura, Statistically Integrated Semiotics that Enables Mutual Inference between Linguistic and Behavioral Symbols for Humanoid Robots, IEEE International Conference on Robotics and Automation, 2009.5.12-17, Kobe, Japan, |
|
 |
|
Ko Ayusawa, Gentiane Venture and Yoshihiko Nakamura, Symbolic Proof of Inertia-Parameter Identifiability of Legged Mechanisms from Unactuated Base-Link Dynamics, 5th IFAC Symposium on Systems Identification, 2009.7.6-8, Saint-Malo, France, |
|
 |
|
Hirotoshi Kunori, Dongheui Lee and Yoshihiko Nakamura, Associating and Reshaping of Whole Body Motions for Object Manipulation, IEEE/RSJ International Conference on Intelligent Robots and Systems, 2009.10.11-15, St. Louis, USA,
|
|
 |
|
Wataru Takano and Yoshihiko Nakamura, Incremental Learning of Integrated Semiotics Based on Linguistic and Behavioral Symbols, IEEE/RSJ International Conference on Intelligent Robots and Systems, 2009.10.11-15, St. Louis, USA,
|
|
 |
|
Gentiane Venture, Ko Ayusawa, Yoshihiko Nakamura, Optimal Estimation of Human Body Segments Dynamics Using Realtime Visual Feedback, IEEE/RSJ International Conference on Intelligent Robots and Systems, 2009.10.11-15, St. Louis, USA, |
|
 |
|
D. Lee, C. Ott and Y. Nakamura "Mimetic Communication with Impedance Control for Physical Human-Robot Interaction," IEEE International Conference on Robotics and Automation, pp.1535-1542, 2009 |
|
 |
|
K. Yamamoto and Y. Nakamura, Switching Feedback Controllers Based on the Maximal CPI Sets for Stabilization of Humanoid Robots, IEEE/RAS International Conference on Humanoid Robots 2009, pp.549-554, 2009 |
|
 |
|
D. Kulic, H. Imagawa, and Y. Nakamura, Online Acquisition and Visualization of Motion Primitives for Humanoid Robots, Robot and Human Interactive Communication, 2009. RO-MAN 2009. The 18th IEEE International Symposium on, pp.1210-1215, 2009 |
|
 |
|
C. Ott, Y. Nakamura, Base Force/Torque Sensing for Position based Cartesian Impedance Control, Intelligent Robots and Systems, 2009. IROS 2009. IEEE/RSJ International Conference on, pp.3244-3250, 2009 |
|
|
| 2010年度 |
|
 |
|
Wataru Takano, Minoru Kanazawa, Yoshihiko Nakamura, Motion-Language Association Model for Human-Robot Communication, 12th International Symposium on Experimental Robotics (査読有), 2010/12/18-21, Delhi, India, |
|
 |
|
Hiroshi Kaminaga, Tomohiro Kawakami, Ko Ayusawa, Yoshihiko Nakamura, Torque Sensitive Manipulator with High-Rigidity Torque Encoder, The First IFToMM Asian Conference on Mechanism and Machine Science, No. 250161 (査読有), 2010/10/21-25, Taipei, Taiwan, |
|
 |
|
Wataru Takano, Hirotaka Imagawa, Dana Kulic, Yoshihiko Nakamura, What do you expect from a robot that tells your future? The Crystal Ball, IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.1780-1785 (査読有), 2010/10/21-25, Taipei, Taiwan, |
|
 |
|
Hiroshi Kaminaga, Tomoya Amari, Yamato Niwa, Yoshihiko Nakamura, Development of Knee Power Assist using Backdrivable Electro-Hydrostatic Actuator, IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.5517-5524 (査読有), 2010/10/18-22, Taipei, Taiwan, |
|
 |
|
Ko Ayusawa, Yoshihiko Nakamura, Identification of Standard Inertial Parameters for Large-DOF Robots Considering Physical Consistency, IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 6194-6201 (査読有), 2010/10/18-22, Taipei, Taiwan, |
|
 |
|
Wataru Takano, Hirotaka Imagawa, Dana Kulic, Yoshihiko Nakamura, Organization of Behavioral Knowledge from Extraction of Temporal-Spatial Features of Human Whole Body Motions, The 2010 IEEE International Conference on Biomedical Robotics and Biomechatronics, pp.52-57 (査読有), 2010/09/26-29, Tokyo, Japan, |
|
 |
|
Hiroshi Kaminaga, Tomoya Amari, Yamato Niwa, Yoshihiko Nakamura, Electro-Hydrostatic Actuators with Series Dissipative Property and Their Application to Power Assist Devices, The 2010 IEEE International Conference on Biomedical Robotics and Biomechatronics, pp.76-81 (査読有), 2010/09/26-29, Tokyo, Japan, |
|
 |
|
Ko Ayusawa, Yoshihiko Nakamura, Identification of Base Parameters for Large-scale Kinematic Chains Based on Physical Consistency Approximation by Polyhedral Convex Cones, 18th CISM-IFToMM Symposium on Robot Design, Dynamics, and Control (ROMANSY2010), pp.91-98 (査読有), 2010/07/05-08, Udine, Italy, |
|
 |
|
Wataru Takano, Yoshihiko Nakamura, Associative Processes between Behavioral Symbols and a Large Scale Language Model, IEEE International Conference on Robotics and Automation, pp.2404-2409 (査読有), 2010/05/03-08, Anchorage, Alaska, USA, |
|
 |
|
Ko Ayusawa, Gentiane Venture, Yoshihiko Nakamura, Identification of Flying Humanoids and Humans, IEEE International Conference on Robotics and Automation, pp.3715-3720 (査読有), 2010/05/03-08, Anchorage, Alaska, USA, |
|
 |
|
Tomohiro Kawakami, Ko Ayusawa, Hiroshi Kaminaga, Yoshihiko Nakamura, High-Fidelity Joint Drive System by Torque Feedback Control Using High Precision Linear Encoder, IEEE International Conference on Robotics and Automation, pp.3904-3909 (査読有), 2010/05/03-08, Anchorage, Alaska, USA, |
|
 |
|
Hiroshi Kaminaga, Tomoya Amari, Yukihiro Katayama, Junya Ono, Yuto Shimoyama, Yoshihiko Nakamura, Backdrivability Analysis of Electro-Hydrostatic Actuator and Series Dissipative Actuation Model, IEEE International Conference on Robotics and Automation, pp.4204-4211 (査読有), 2010/05/03-08, Anchorage, Alaska, USA, |
|
 |
|
Carlos Santacruz, Yoshihiko Nakamura, Walking Motion Generation of Humanoid Robots via Minimal Energy Control and Symmetry Condition, 第16回ロボティクスシンポジア, pp.243-248 (査読有), 2011/03/14-15, 指宿, |
|
 |
|
K. Yamamoto and Y. Nakamura, Switching Control and Quick Stepping Motion Generation Based on the Maximal CPI Sets for Falling Avoidance of Humanoid Robots in Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA2010), pp.3292-3297, Anchorage, Alaska, USA, May, 2010. |
|
 |
|
A. Murai, K. Yamane, and Y. Nakamura, Effects of nerve signal transmission delay in somatosensory reflex modeling based on inverse dynamics and optimization, ICRA 2010, pp.5076-5083, 2010 |
|
 |
|
C. Ott, R. Mukherjee, Y. Nakamura, Unified Impedance and Admittance Control, IEEE International Conference on Robotics and Automation, ICRA 2010, Anchorage, Alaska, USA, 3-7 May 2010 |
|
 |
|
玉成錫,中村仁彦,シリアルリンク系で構成された球車輪を用いたパーソナルモビリティーの起立制御, 第16回ロボティクスシンポジア, pp.481-486 (査読有), 2011/03/14-15, 指宿, |
|
|
| 2011年度 |
|
 |
|
H. Kaminaga, K. Odanaka, T. Kawakami, Y. Nakamura, Measurement Crosstalk Elimination of Torque Encoder Using Selectively Compliant Suspension, 2011 IEEE International Conference on Robotics and Automation, pp.4774-4779 (査読有), 2011/5/9-13, Shanghai, China, |
|
 |
|
C. Santacruz, Y. Nakamura, Motion Generation for Biped Robots Based on Minimal Energy Control, The International Federation for the Promotion of Mechanism and Machine Science IFToMM2011, A12_461 (査読有), 2011/6/19-25, Guanajuato, Mexico, |
|
 |
|
H. Kaminaga, H. Tanaka, Y. Nakamura, Mechanism and Control of Knee Power Augmenting Device with Backdrivable Electro-Hydrostatic Actuator, The International Federation for the Promotion of Mechanism and Machine Science IFToMM2011, A12_534 (査読有), 2011/6/19-25, Guanajuato, Mexico |
|
 |
|
H. Tanaka, H. Kaminaga, Y. Nakamura, An Exoskeletal Hydrostatic Power-Assisting Mechanism and its Pressure Feedback Control Based on Singular Perturbation Method, 2nd IFToMM International Symposium on Robotics and Mechatronics, ISRM2011-15,ISRM2011-15 (査読有), 2011/11/3-5, Shanghai, China, |
|
 |
|
K. Ayusawa, G. Venture, Y. Nakamura, Real-time Implementation of Physically Consistent Identification of Human Body Segments, 2011 IEEE International Conference on Robotics and Automation, pp.6282-6287 (査読有), 2011/5/9-13, Shanghai, China, |
|
 |
|
K. Ayusawa, Y. Nakamura, Fast Inverse Dynamics Algorithm with Decomposed Computation of Gradient for Wire-Driven Multi-Body Systems and its Application to Estimation of Human Muscle Tensions, 2nd IFToMM International Symposium on Robotics and Mechatronics,ISRM2011-11 (査読有), 2011/11/3-5, Shanghai, China, |
|
 |
|
M. Hayashibe, G. Venture, K. Ayusawa, Y. Nakamura, Muscle Strength and Mass Distribution Identification Toward Subject-Specific Musculoskeletal Modeling, 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 3701-3707 (査読有), 2011/9/25-30, San Francisco, USA |
|
 |
|
S. Hamano, W. Takano, Y. Nakamura, Motion Data Retrieval Based on Statistic Correlation between Motion Symbol Space and Language, IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.3401-3406 (査読有), 2011/9/25-30, San Francisco, USA, |
|
|
| 2012年度 |
|
 |
|
鮎澤光, 中村仁彦, "勾配計算分解を用いた逆運動学計算の高速化および大自由度筋骨格モデルへの応用", 第17回ロボティクスシンポジア, pp.148-155, 山口県萩市, May 14-15, 2012. K.Ayusawa, Y. Nakamura, “Fast Inverse Kinematics Algorithm for Large DOF System with Decomposed Computation of Gradient and its Application to Musculoskeletal Model,” Robotics Symposia, pp.148-155, Yamaguchi, Japan, March 14-15, 2012 |
|
 |
|
濱野聖也, 高野渉, 中村仁彦, "統計的生成モデルに基づく運動と言語の文脈を抽象化する概念の形成", 第17回ロボティクスシンポジア, pp.515-520, 山口県萩市, March 14-15, 2012.
|
|
 |
|
C. Santacruz, Y. Nakamura, “Walking Motion Generation of Humanoid Robots via Minimal Energy Control and Symmetry Condition,” Robotics Symposia, pp. 243-248, Hagi, Yamaguchi, Japan, 2012. |
|
 |
|
Wataru Takano, Junichi Ishikawa, Yoshihiko Nakamura, “Recovery of 3 Dimensional Human Whole Body Motion from a Monocular Image Sequence by Using Human Behavior Database”, The 2nd IFToMM Asian Conference on Mechanism and Machine Science, Tokyo, Japan, Nov.7-10,2012.
|
|
 |
|
Wataru Takano, Yoshihiko Nakamura, “Bigram-Based Natural Language Model and Statistical Motion Symbol Model for Scalable Language of Humanoid Robots”, Proc. of IEEE International Conference on Robotics and Automation, pp.1232-1237, St. Paul, USA, May 14-18, 2012
|
|
 |
|
K. Ayusawa, Y. Nakamura, “Fast Inverse Kinematics Algorithm for Large DOF System with Decomposed Gradient Computation Based on Recursive Formulation of Equilibrium.” IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 3447-3452, Vilamoura, Portugal, 2012.
|
|
 |
|
K. Hirasawa, K. Ayusawa, Y. Nakamura, “Muscle Activity Estimation Based on Inverse Dynamics and Muscle Stress Analysis by Finite Element Method.”CISM-IFToMM Symposium on Robot Design, Dynamics, and Control, ID-45, Paris, France, 2012.
|
|
 |
|
Hiroshi Kaminaga, Hirokazu Tanaka, Kazuki Yasuda, and Yoshihiko Nakamura, "Viscous Pump for Highly Backdrivable Electro-Hydrostatic Actuator, Proc. of International Conference of Robotics and Automation, pp. 3751-3756, St. Paul, USA., May 14-18, 2012.
|
|
 |
|
Carlos Santacruz and Yoshihiko Nakamura, “Analytical Realtime Pattern Generation for Trajectory Modification and Foot-Step Replanning of Humanoid Robots.” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2095-2100, Vilamoura, Portugal, 2012.
|
|
 |
|
Q.-C. Pham, Y. Nakamura. Planning aggressive dynamically-stable motions for humanoid robots by time-optimal path parameterization. Proc. of IEEE-RAS International Conference on Humanoid Robots, Osaka, Japan, Dec. 2012
|
|
 |
|
Q.-C. Pham, Y. Nakamura. Affine trajectory deformation for redundant manipulators. Robotics : Science and Systems, Sydney, Australia, 2012.
|
|
|

|

