Professor Fukao reseaches field robotics related on autonomous driving of passenger cars, trucks, and agricultural vehicles/ autonomous harvesting of fruits and tomatoes/autonomous flight of drones and blimps/ autonomous mobile robots.
Autonomous Driving
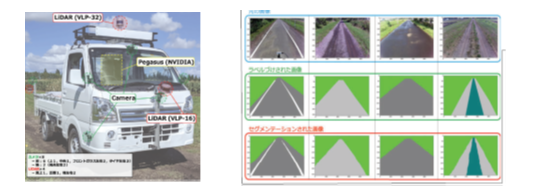
Various kind of autonomous cars and trucks have been researched, such as autonomous parking, autonomous avoidance system with two in-wheel motors, four truck platooning, and robust driving on snowy road.

The current research is autonomous small truck in rural area where the road edge is not clear and there are many difficulties.
Autonomous Harvesting of Cabbages
Autonomous harvesting of cabbages consists of cabbage detection by using deep learning and depth camera.
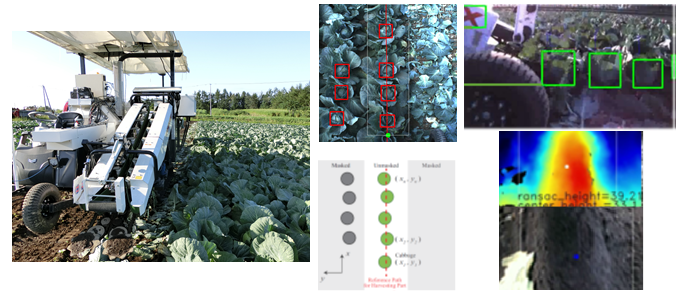
Autonomous exchange of cabbage containers and autonomous driving of a container carrier save labor time.

Autonomous Harvesting of Onions
Autonomous harvesting of onions consists of onions detection by using semantic segmentation and depth camera. The harvester and parallelly driving tractor with a trailer equip with accurate RTK-GNSS/Compass.

Autonomous Forklift
Autonomous forklift consists of container detection by using deep learning and LiDAR. It also uses position estimate by RTK-GNSS/Compass in the open air and LiDAR SLAM not in the open.

Autonomous Orchard Vehicle
The position and yaw angle estimation is performed by stem detection by using deep learning and LiDAR. Based on the estimated values, an autonomous vehicle drives autonomously with a mower in orchard.

Autonomous Fruit Harvesting Robot
A fruit harvesting robot with two arms consists of fruit detection by using deep learning and depth cameras to measure the distance between robot hand and the target fruit. This robot is carried by autonomous orchard vehicle. Current target fruits are apple and pear.
