山本准教授のグループでは、全てのロボットの基礎となる力学・制御・アクチュエータの研究分野をベースに、そのスポーツ科学への応用、具体的には
- スポーツに見られるような柔軟かつパワフルで巧みな運動を実現するロボットの制御とアクチュエータ
- スポーツにおける人間の運動のバイオメカニクス
の研究に取り組んでいます。
Prof. Ko Yamamoto is involved in the research on Sports Robotics, including
- Robot control & actuator to achieve flexible, powerful, and skillful sport-like motions
- Biomechanics of Dynamic Human Motion in Sports
Please see the English version from http://www.ynl.t.u-tokyo.ac.jp/member/yamamoto-ko/index.php/research/
Robot Control & Actuator for Sport-like Dynamic Motion
Hydraulic Actuators
油圧アクチュエータをはじめとした柔軟性と大出力性を両立する新しいロボットアクチュエータを開発しています。開発したアクチュエータは、ソフトロボットやヒューマノイド、フィールドロボット等に応用されています。
Humanoid Motion Control
ロボティクスの中でもヒューマノイドの運動制御は多くの課題が残されている研究分野の1つです。身体の柔軟性を上手く制御することで、未知の環境でも安定に転倒することなく歩行が可能な制御や、跳躍や走行などのダイナミックな運動制御の研究に取り組んでいます。
Soft Robotics
柔軟材料でロボットの身体を構成するソフトロボティクスが注目を集めています。数MPaの圧力によって人間スケールの力を発揮できるソフトハンドや、柔軟変形をシミュレーションするために必要な力学モデルに関する研究を行っています。
Biomechanics of Dynamic Human Motion in Sports
Musculo-skeletal Modeling
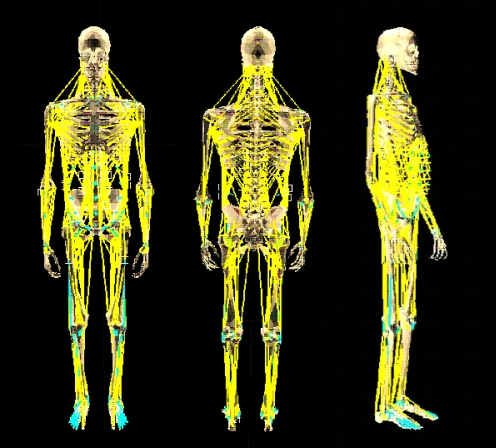
ロボットの力学計算アルゴリズムを基にした筋骨格モデルを開発し、それを用いてスポーツをはじめとした人間の運動解析に関する研究を行っています。
VMocap
人工物工学センター社会連携講座「ヒューマンモーション・データサイエンス」と協力し、深層学習を用いたビデオモーションキャプチャに関する新技術の開発を行っています。