|
 |

| 行動の学習と獲得のための情報処理 |
| |
*1大阪大学大学院工学研究科,*2阪大FRC
浅田 稔*1*2
|
本研究グループでは,ロボットのタスク遂行のための学習を目指すが,タスクに特化したアプローチではなく,脳型の情報処理として意味がある課題にアタックし,それにたいする手法を提案し,実験を通して検証することを目的としている.本節では,以下の三つの研究課題について実施内容及び成果の概要を述べる.
|
1. |
脚式移動ロボットの行動決定のための情報量規範に基づく観測戦略学習:視覚センサを持つ脚式移動ロボットの行動決定のための効率のよい観測戦略をの行動決定への寄与を情報量により比較し,寄与の大きい観測から実行することにより,静止観測時及び移動中の観測時のの効率的な観測戦略を実現した. |
|
2. |
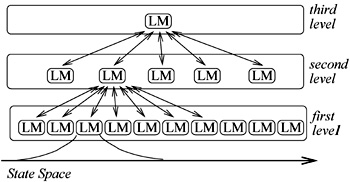
複数の学習器の階層的構築による行動獲得:同一構造の学習器を複数用いて階層的に構築することによる行動獲得法を提案し,ロボカップ中型リーグのロボットに適用した.従来の手法とは異なり,それぞれの学習器が担当するサブゴール,タスクは自律的に決定され,また階層も自律的に構成される.また,階層型学習機構において異なる部分空間を状態空間として持つ下位の層の学習器を統合し,より多くの状態変数によって表現される状況における行為を上位の層で獲得することが可能であることを示した. |
|
3. |
視覚情報に基づくヒューマノイドのリズム歩行パラメータの強化学習:ヒューマノイドの多様な行動生成手法のひとつとして,視覚情報に基づくヒューマノイドのリズム歩行パラメータの強化学習手法を扱った.タスクとしてロボカップ・ヒューマノイドリーグにおける状況を想定し,ゴール前に置かれたボールにアプローチしキックする動作を実現した. |
|
|

|