|
 |

不連続位相変化をする非線形振動子を
用いた歩行制御 |
| |
*京都大学大学院工学研究科
土屋 和雄*
|
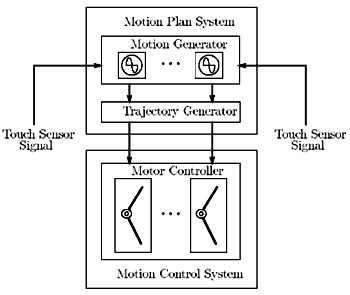
脚歩行ロボットは回転ジョイントで結合された多数のリンクから構成される機械システムである.脚歩行ロボットの歩行運動は,多自由度機械システムのリズム運動であり,歩行制御とは,多自由度機械システムのリズム運動の制御である.本研究では,二脚歩行ロボットの歩行制御を扱うが,特に静的に不安定な姿勢を取る動的歩行の歩行制御を行なう.多自由度機械システムの運動制御に対して,モデルベースト制御法に基づいた制御系が開発されている[1].この制御系は運動計画系と運動制御系から構成されている.運動計画系では機械システムの基準運動が生成され,運動制御系ではその基準運動を実現するように各自由度が制御される.この制御系は外乱に対してロバストでなく,また環境の動的変化に対して適応できない.これらの弱点を克服する方法として運動計画系をある力学系で構成する方法[2],[3]が考えられる.その力学系の状態を用いて歩行ロボットの基準歩行運動,各回転ジョイントの基準回転角をエンコードする.この力学系に外界センサー信号を入力し,力学系の状態を環境の動的変化に対応して変化させる.その結果,環境の動的変化に対応した基準歩行運動,基準回転角が生成される.我々はこの方法を用いて二脚歩行ロボットの歩行制御系を開発してきた[4],[5].即ち,運動計画系を運動生成系と軌道生成系から構成する.運動計画系はリミットサイクルを持つ非線形振動子から構成する.各非線形振動子は相互作用項とともに,足先に取り付けられた接地センサー信号からの入力項を持つ.その結果,各非線形振動子は環境の動的変化に対応した状態変化をする.一方,軌道生成系は各回転ジョイントの基準回転角を対応する非線形振動子の位相角の関数として表現する関数系で構成される.本研究において我々は非線形振動子を用いた二脚歩行ロボットの歩行制御系を開発した.そしてその有効性を数値シミュレーションおよびハードウエア実験により検証した.
|
[1] |
An C.H., Atkeson C.G., and
Hollerbach J.M.: Model-based control of a robot manipulator, MIT Press,
1988. |
|
[2] |
Ijspeert A.J., Nakanishi
J. and Schaal S.: Trajectory Formation for Imitation with Nonlinear
Dynamical Systems, Proc. IEEE/RSJ Int Conf on Intelligent Robots and
Systems (IROS 2001), pp.752-757, 2001. |
|
[3] |
Ijspeert A.J., Nakanishi
J. and Schaal S.: Learning Rhythmic Movements by Demonstration using
Nonlinear Oscillators, Proc. IEEE/RSJ Int Conf on Intelligent Robots
and Systems (IROS 2002), pp.958-963, 2002. |
|
[4] |
Tsujita K., Tsuchiya K. and
Onat A.: Adaptive Gait Pattern Control of a Quadruped Locomotion Robot,
Proc. IEEE/RSJ Int Conf on Intelligent Robots and Systems (IROS 2001),
pp.2318-2325, 2001. |
|
[5] |
Tsuchiya K. Aoi S. and Tsujita
K.: Locomotion Control of a Biped Locomotion Robot using Nonlinear
Oscillators, Presented at IEEE/RSJ Int Conf on Intelligent Robots
and Systems (IROS 2003), 2003. |
|
[6] |
Kuramoto Y. : Chemical Oscillations,
Wave and Turbulence, Springer, Berlin, 1984 |
|
|

|