|
 |

�͊w�I����̃��A�v�m�t�v��
�^���p�^�[���J�ڐ��� |
| |
*1����w��w�@��b�H�w������
�� �r��*1
|
�q���[�}�m�C�h���{�b�g�ɑ��l�ȓ���������邽�߂ɂ́C�v���~�e�B�u�ȓ���̌����I�ȕ\�����d�v�ł���D��{�p���Ԃ̑J�ڊW��\�����}���\���Ƃ��ăX�e�[�g�l�b�g���L���ł���[1]�D�X�e�[�g�l�b�g�͗l�X�ȐÎ~��Ԃ��Z���T��ԏ�̓_�Ƃ��ĕ\���C���̊Ԃ̑J�ڂ�L���}�Ƃ��ĕ\�������̂ŁC�V�����s���̒lj���C�����e�Ղł���D�������Ȃ���C���s�̂悤�Ȏ����I�ȓ���̕\���͍l������Ă��Ȃ��D
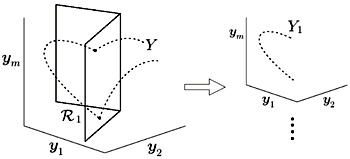
����C����`�V�X�e�����_�ɂ����āC���]�̈�������O�������悤�ȗ͊w�n�̐v���@���Â����猤������Ă����DGreen�́C���]�̎����O������肷�鐧����̓��o���@�Ƃ��̐�������烊�A�v�m�t�����\�����邱�ƂŁA���̎����O�������͊w�n�̍\�����@��������[2]�D
�{�����ł́CGreen�̕��@�����p���āC�q���[�}�m�C�h���{�b�g�̎����s���̗͊w�I�\�����@���Ă���[3]�D���s����I�ɓ���ꂽ�v���~�e�B�u�ȓ�����Z���T��ԏ�̃f�[�^�������������ŁC�͊w�n���\�������D�����ɂ��{��@�̗L�������m�F�����D����ɁC�v���~�e�B�u�ȍs���Ԃ̑J�ڂ�\�����߂ɁC�X�e�[�g�l�b�g���g�������n�C�u���b�h�X�e�[�g�l�b�g���Ă���[4]�D
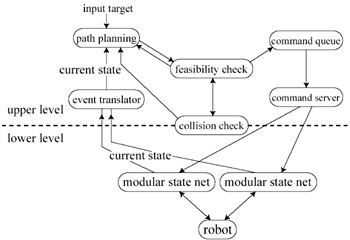
�܂��C�q���[�}�m�C�h���{�b�g�̃��[�V�����v�����j���O�̂��߂̃X�[�p�o�C�U����V�X�e�����Ă���[5]�D��ăV�X�e���͂Q�̃��x������Ȃ�K�w�\�������Ă���D���ʑw�ł́C���W�����X�e�[�g�l�b�g��p���ă��{�b�g�̍s���𐧌䂵���j�^�����O����D���W�����X�e�[�g�l�b�g�Ƃ́C���{�b�g�̘r�C�r�ȂǂƂ������e�v�f���Ƃ̓����\������X�e�[�g�l�b�g�ł���C���{�b�g�S�g�̓���́C���̊e�p�[�c�ɑ��郂�W�����X�e�[�g�l�b�g�̑g�����ɂ���ĕ\�������D��ʑw�ł́C���ԕt�y�g���l�b�g��p���ă��[�U�̗v���ɑ���œK����n�������D�S���W�����X�e�[�g�𒊏ۃ��f�����������ԕt���y�g���l�b�g�����C���U���ۃV�X�e�����_�ɂ���čœK�K�͂Ɋ�Â��X�[�p�o�C�U������s�����D
����ɁC�����w�K��p���ăX�[�p�o�C�U���\������Ƃ��ɁC�����𑬂����邽�߂̕��@���Ă���[6]�D
�����̌������ʂ�p���邱�ƂŁC�q���[�}�m�C�h���{�b�g�̑��l�ȍs����e�Ղɕ\���ł���悤�ɂȂ�C���̌��ʁC���G�ȍs���̐������\�ƂȂ����D
|
[1] |
F. Kanehiro, M. Inaba, H.
Inoue, and S. Hirai: Developmental Realization of Whole-Body Humanoid
Behaviors Based on State Net Architecture Containing Error Recovery
Functions, Proc. of the First IEEE-RAS International Conference on
Humanoid Robots, 2000. |
|
[2] |
D. N. Green : Synthesis of Systems with Periodic Solutions Satisfying V(x)=0 IEEE Transactions on Circuits and Systems, Vol. 31, No. 4, pp. 317�326, 1984. |
|
[3] |
Masakazu ADACHI, Toshimitsu USHIO, and Shigeru YAMAMOTO : Application of Lyapunov Function
Based Synthesis of Nonsmooth Limit Cycles to Motion Generation for Humanoid Robots, Proc.
of 2nd International Symposium of Adaptative Motion of Animals and Machines, SaP-II-4, March,
2003. |
|
[4] |
�����G�s�C���ь[��C���r��: �n�C�u���b�h�I�[�g�}�g����p�����q���[�}�m�C�h���{�b�g��
�����I����̐����C2003 �N��������A���u����C2003. |
|
[5] |
���ь[��C���J�Đl�C�����G�s�C���r�� : ���ԕt���y�g���l�b�g�ƃ��W�����X�e�[�g�l�b�g��p�����q���[�}�m�C�h���{�b�g�̍s���v��CVol.
16, No. 10, pp. 493-499, 2003. |
|
[6] |
�R��B�u�C���r�� : �����w�K��p�������U���ۃV�X�e���̃X�[�p�o�C�U����C�V�X�e��������w��_�����CVol.
16, No. 3, pp. 118-124, 2003. |
|
|

|
![���{�b�g�̔]��n�� Robot Brain Project](../img/j_header01.jpg)
![CREST �����s���P�ʂ̗͊w�I�����ɂ��]�^����@�B�̊J��](../img/j_header02.jpg)