|
 |

運動パターンの認識と生成を統一する
統計的情報処理
- 連続的世界の記号化に向けて - |
| |
*1東京大学大学院情報理工学系研究科,*2CREST
稲邑 哲也*1,中村 仁彦*1*2
|
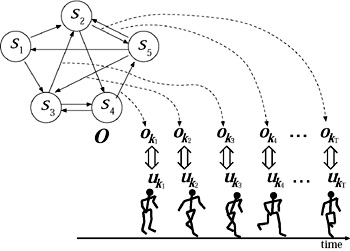
我々はヒューマノイドロボットにおける運動パターンの認識/生成の問題から知能への接近を試みるため,隠れマルコフモデルの確率的な情報処理の枠組みにに着目し,連続的な運動認識・生成と離散的なシンボルの操作の問題を統合する数理モデルの提案を行った[1].このモデルは,発達心理学の分野において注目されているミメシス理論[2]に基づいている.ミメシス理論は見まねを通じたコミュミケーションがシンボル操作などの高度な知能の根源であるとする理論である.モデル実装に採用した隠れマルコフモデル(HMM)は,運動パターンなどの時系列データを認識するだけでなく,見まねを通じて原始的なシンボルを獲得するのに相応しく,特に連続分布型HMMを用いた時系列パターン生成法を導入することで,抽象化された表現からの滑らかな運動パターンの復元が可能となった[3].
シンボル操作に基づく運動認識/生成を考える場合,複数のシンボル間に存在する関係性と,そのシンボルに対応する運動パターン同士の間に存在する関係性には密接な関係がある.「シンボル間の関係」と「パターン間の関係」の関係が発達して行く事で,シンボルグラウンディングが成されて行くとするのが,Deacon
の主張[4]である.このシンボルの発達理論に沿うような枠組みを確立させるため,隠れマルコフモデル間の擬似的な距離をKullback-Leibler情報量を用いて定義し,多次元尺度法に基づいて原始シンボルを空間に配置する手法を考案し,形成される空間を原始シンボル空間と定義した.さらに,原始シンボル空間における幾何学的な操作から運動パターンの情報処理を実現する手法を考案することで,他者の未知の運動を既知の運動の組み合わせとして認識する機能,既知の運動を組み合わせることで新規の自己の運動を生成する機能を実現した.これにより,連続的な運動と離散的なシンボル表現とをマッピングするための基本的な表現手法が確立した[5].
|
[1] |
Tetsunari Inamura, Iwaki
Toshima, and Yoshihiko Nakamura. Acquisition and embodiment of motion
elements in closed mimesis loop. In the Proc. of IEEE Int'l Conf.
on Robotics & Automation, pp.1539-1544, 2002. |
|
[2] |
Merlin Donald. Origins of
the Modern Mind. Harvard University Press, Cambridge, 1991. |
|
[3] |
稲邑哲也, 谷江博昭, 中村仁彦. 統計的情報処理に基づく時系列データのキーフレーム抽出・認識・再生.
第21回日本ロボット学会学術講演会予稿集, p. 2J22, 2003. |
|
[4] |
Terrence W. Deacon. The symbolic
species. W.W. Norton & Company. Inc., 1997. |
|
[5] |
Tetsunari Inamura, Hiroaki
Tanie, and Yoshihiko Nakamura. From stochastic motion generation and
recognition to geometric symbol development and manipulation. In International
Conference on Humanoid Robots, 2003. (CD-ROM). |
|
|

|