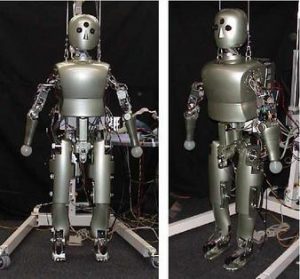
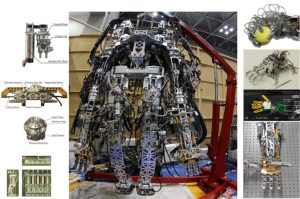
Hydra
- H. Kaminaga, T. Ko, S. Yorita, S. Sato, R. Masumura, M. Komagata, T. Ishikawa, T. Miyatake, and Y. Nakamura, “Enhancement of Mechanical Strength, Computational Power, and Heat Management for Fieldwork Humanoid Robots”, 16th IEEE-RAS International Conference on Humanoid Robots, pp. 786-793, November 15-27, 2016, Cancun, Mexico
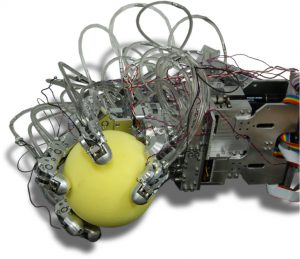
- T. Ko, H. Kaminaga, Y. Nakamura, “Underactuated Four-fingered Hand with Five Electro Hydrostatic Actuators in Cluster, ” in proceedings of IEEE International Conference on Robotics and Automation, pp.620-625, 2017.
UT-delta, UT-delta2
Motion Control

- Stephane Caron, Quang-Cuong Pham and Yoshihiko Nakamura, “ZMP support areas for multi-contact mobility under frictional constraints”, IEEE Transactions on Robotics (2016). doi: 10.1109/TRO.2016.2623338.
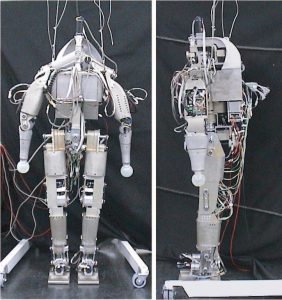
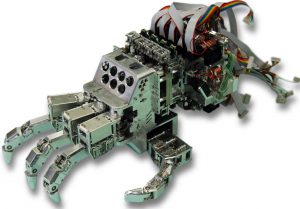
UT-mu, UT-mu2

- T. Sugihara, K. Yamamoto and Y. Nakamura. “Hardware design of high performance miniature anthropomorphic robots,” Robotics and Autonomous Systems, Vol. 56, Issue 1, pp.82-94, 2007. [DOI: 10.1016/j.robot.2007.09.012]
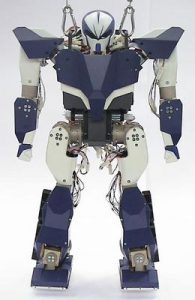
UT-gamma
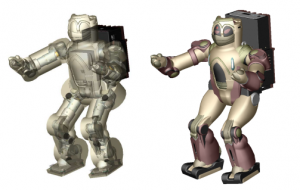
UT-theta, UT-theta2