|
 |

運動パターンの生成と遷移のための
力学的情報処理 |
| |
*1東京大学大学院情報理工学系研究科,*2CREST
岡田 昌史*1,中村 仁彦*1*2
|
これまで,ロボットの運動は外界の情報を判断する機構と運動を生成する機構に分けられ,これらが独立に設計されてきた.情報判断機構ではロボットの運動を「歩く」,「走る」といった抽象的な表現で表し,外界からの情報によって最適な運動を選択する離散事象システムとしての設計がなされてきた.運動決定機構では運動のための参照軌道の存在を前提として環境の変化に対してロバストな安定化コントローラの設計法が中心に議論されてきた.一方,Freemanらはウサギの嗅球電位において,既知の刺激に対する秩序と未知の刺激に対するカオス状態を実験的に示し,非線形力学現象と記憶や知能との深い関連を示した[1,2].津田は学習におけるカオス力学系の有効性を提唱し,脳が多安定な力学系としていくつかの安定状態を遷移していく様子をカオス的遍歴と呼んだ[3].これらの結果は力学系と生体の情報処理系の密接な関係を示唆している.この結果を基にして,力学系を利用した知能や情報処理系に関する研究が注目されるようになった.これらの結果を基にして,本研究では力学系を用いたロボットの情報処理系の設計を行った.ここでは,ロボットの全身周期運動をN次元空間内の閉曲線として表現し,これをアトラクタとする力学系の設計を行った.環境・ロボットの身体・情報処理系の相互作用による引き込みによってロボットの運動が生成され,運動パターンは引き込みの結果として生まれるといった考えに基づくものである.
本研究での成果は以下の4つに分けられる.
|
1. |
ロボットは多くの自由度を持ち,これを扱うためには多くの計算量を必要とする.そこで,関節角の相関を利用した運動の低次元化法を提案した. |
|
2. |
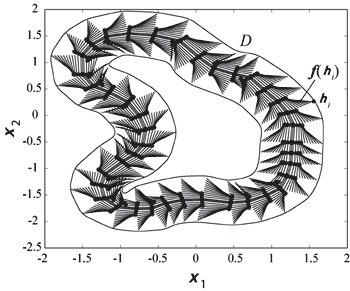
N次元空間における曲線をアトラクタとする力学系の設計法を提案し,ロボットの運動を表現する連続システムの設計を行った. |
|
3. |
センサ信号に基づいてアトラクタの引き込み領域を変化させ,運動の遷移を行うシステムの設計を行った. |
|
4. |
力学系を階層化することで運動を決定する力学系を定める上位の力学系を設計し,運動の連続的記号空間の設計を行った. |
|
[1] |
W.Freeman and W.Schneider
: Changes in Spatial Patterns of Rabbit Olfactory EEG with Conditioning
to Odors, Psychophysiology, Vol.19, pp.44-56, 1982. |
|
[2] |
Y.Yao and W.J.Freeman : Model
of Biological Pattern Recognition with Spatially Chaotic Dynamics,
Neural Networks, Vol.3, pp.153-160, 1990. |
|
[3] |
I. Tsuda : Chaotic itinerancy
as a dynamical basis of Hermeneutics in brain and mind, World Futures,
31, pp.105-122, 1991. |
|
|

|