|
 |

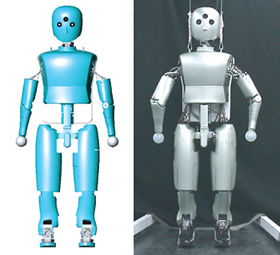
| ヒューマノイドロボット・デザインと運動性進化 |
| |
*1東京大学大学院情報理工学系研究科,*2CREST
岡田 昌史*1,中村 仁彦*1*2
|
メカトロニクス技術の発達による小型・高性能のセンサ,アクチュエータ,モータドライバの開発に伴って,ヒューマノイドロボットの機構も発達してきた.ヒューマノイドロボットの運動性進化のためには,自由度を増やすことが挙げられる.しかし,これは小型化,軽量化といった観点から,多くの設計技術を要する.本研究では,ヒューマノイドロボットの機構に着目し,
|
 |
関節配置による運動性能の向上 |
|
|
高トルク伝達特性と零トルク伝達の実現 |
を目指した機構の開発を行った.
これまでのヒューマノイドロボットの関節は,ロボットの身体と環境との力学的な相互作用を許さない.関節はハイゲインなフィードバックコントローラで制御され,減速比の高いギアによって構成されるため,バックドライバビリティは低いものとなっている.これに対し,人間の自然な歩行やダンスなどの動的な動きは環境との動的な接触によって生まれる.センサ信号としてのみではなく,身体の力学的な現象として重力を感じ,知能的なセンサリモータマップを構成する.ヒューマノイドロボットの運動は人間の運動の見まねではなく,身体と環境との力学的相互作用によって自分の運動を獲得するものである.
これより,本研究ではヒューマノイドロボットの運動性向上を目的とした2つの機構を開発した.二重球面ジョイントは6自由度を持つ関節機構で,全ての軸の回転中心が一点で交わったものである.この機構を用いた股関節機構はアクチュエータを増やすことなく腰関節機構の役割も持つ.バックラッシュクラッチはモータと関節の駆動伝達機構であり,高トルク伝達特性と零トルク伝達(フリー)の両方を実現するメカニカルなクラッチである.この機構をヒューマノイドロボットの膝関節に用い,この関節の制御方法を開発した.また,最後に二重球面ジョイントを用いた股関節,バックラッシュクラッチを用いた膝関節,サイバネティックショルダ[1]を用いた肩関節によるヒューマノイドロボットを開発し,その有効性を基礎的な実験によって検証した.
一方,これまでに開発されたヒューマノイドロボットは1[m]を超えるものが多く,その運動能力は過酷な実環境に対してあまりに脆弱である.実環境を自在に移動する高機動性を実現するための運動制御は中途段階にあり,基礎理論の構築を一層押し進める必要があろう.そのためにも小型・計量で実験を円滑に行うことができるヒューマノイドロボットの開発が必要であろう.そこで本件研究では,新たに小型なヒューマノイド実験環境を提供するロボットの設計を行った.これについて,詳細を述べる.
|
[1] |
M.Okada, Y.Nakamura and S.Hoshino
: Development of the Cybernetic Shoulder -A Three DOF Mechanism that
Imitates Biological Shoulder-Motion -, Proc. of IEEE/RSJ International
Conference on Intelligent Robots and Systems(IROS'99), pp.543-548,
1999. |
|
|

|