|
 |

| ヒューマンフィギュアの力学計算と行動計測 |
| |
*1東京大学大学院情報理工学系研究科,*2CREST
山根 克*1,中村 仁彦*1*2
|
ヒューマノイドは運動の自由度(=関節数+腰の自由度6)に対し駆動できる自由度数(=関節数)が少ないため,任意の運動を実現できるわけではない.また20以上の自由度を持ち全身運動の作成は難しく,モーションキャプチャや数値的な生成法に頼っているのが現状であり,目的に応じて柔軟に運動を変更することはできない.そのため,直感的に多数の自由度を操作できるインタフェースや,力学的に実現可能な運動を自動的に生成する方法が望まれている.
脳型情報処理の研究においては,出力である運動だけではなく入力となる視覚・体性感覚などの感覚情報を同時に計測・計算することが重要となる.商用のモーションキャプチャシステムは運動を計測することを目的としており,感覚情報を計測できるものはない.また,計測されるデータはヒューマノイド程度の自由度のリンクモデルに適用されるのが普通で,体性感覚のような情報を計算することはできない.さらに,商用システムでは独自にハードウェアを追加したりソフトウェアを改良したりするのは難しい.
本研究では,以上の問題を解決するために以下の計算法・システムを開発した.
|
 |
並列高速動力学計算法:力学を考慮した運動生成の基礎となる.また,これを高速化することによりヒューマノイドの動力学シミュレーションや制御のための計算も高速に行うことができる. |
|
|
力学的整合性を考慮したヒューマンフィギュアの運動生成法:モーションキャプチャデータを使うことにより,人間の運動に近く,かつ力学的に実現可能な運動を生成できる. |
|
|
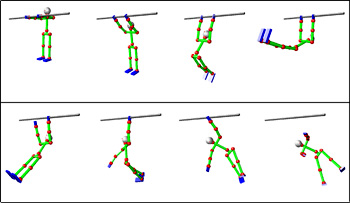
逆運動学計算を用いた直感的な運動生成法:従来の逆運動学計算法を拡張し,1個のリンクの軌道を指定するだけでヒューマンフィギュアの自然な全身運動を計算する方法を開発した. |
|
|
ビヘイビアキャプチャシステム:独自に開発したモーションキャプチャシステムに,フォースプレート,アイマークレコーダなどの計測機器を組み合わせ,同時計測できるようにした. |
|
|
ヒトの筋骨格モデルの力学計算法:ヒューマノイド用に開発した計算法を拡張し,多数の筋・腱と骨で構成されたモデルの力学計算を行い,体性感覚の計算を可能とした. |
本研究の成果により,ヒューマンフィギュアの実時間動力学シミュレーション,運動生成および運動・感覚計測のための技術が確立されたと考えられる.実際,本プロジェクトの他のグループでもこれらの成果が活用されているだけでなく,ヒューマノイドシミュレータやCGアニメーションソフトウェアとして実用化されている.
|
|

|