|
 |
研究成果|身体運動コーパスの構築
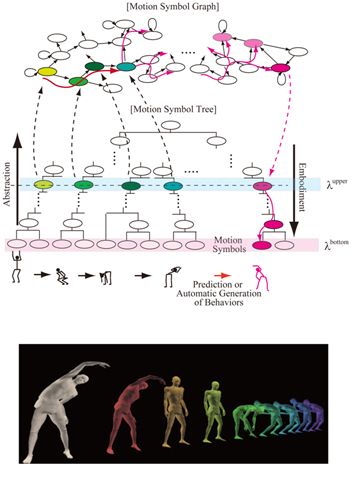
我々は,全身運動パターンを統計モデルによって学習・記号化・記憶するヒューマノイドロボットの知能の枠組みを提案してきた.この運動の記号によって,ロボットは人間の行動を記憶のある運動の記号と照らし合わせることによって,その行動を理解することができる.また,記憶した運動の記号から身体運動を生成することによって,環境に対して身体を通じて働きかけることができるのである.これは,身体運動を記号表現として記憶し,行動理解・生成へ再利用するヒューマノイドロボットの知能である.
人間と生活空間を共有するヒューマノイドロボットには,膨大な人間の身体運動を観察,記憶し,行動理解・生成への効率的な再利用技術が求められる.本研究テーマでは,大規模な身体運動の記憶を,記号を通じて構造化する運動データベースを構築した[1][2].運動データベースは,身体運動の類似度に基づいた運動の階層構造化とその時系列関係からの因果律抽出を基盤とする.運動の記号間の距離を統計的尺度であるKullback Leibler情報量として求め,その距離構造からWard法によって二分岐階層構造を構築する.日常の行動を運動記号の時系列として表現し,記号をノード,記号間の遷移をエッジとした統計的グラフィカルモデルによって学習することによって,運動の因果律を抽出する.統計的グラフィカルモデル上において,現在の運動から確率の高い未来の運動記号列を探索問題として解くことによって,ヒューマノイドロボットは人間の行動を予測することが可能となる.朝7時に起きて,顔を洗い,新聞を読み,食事を終えると外出するあなたを毎日見ているヒューマノイドロボットが,あなたが朝起きる姿を見るとその先を予測して,新聞を用意し,食事を出してくれるようになる未来への第一歩となる.
また,身体運動データベースを,動きを映像として投影した画像シルエット特徴量や筋張力データを含むように拡張することによって,単眼カメラによって撮影した人間の運動から3次元身体運動を復元する技術や力情報を含まない身体運動から筋張力など力学情報を推定する技術が確立されつつある[3][4].
|
[1] |
Wataru Takano, Hirotaka Imagawa, Dana Kulic, Yoshihiko Nakamura : “What Do You Expect from a Robot that Tells Your Future? The Crystal Ball, ” The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.1780-1785, Taipei, Taiwan, October 18-22,2010. |
|
[2] |
高野 渉,今川 洋尚,クリッチ・ダナ,中村 仁彦,“クリスタルボール,“運動の記号推論を通じた未来の行動予測”,日本ロボット学会誌,Vol.29. No. 8, pp.745-751, 2011. |
|
[3] |
高野 渉, 石川 淳一,中村 仁彦,“2次元映像から3次元身体運動の連想を可能とする大規模運動データベースの設計”,日本機械学会ロボティクスメカトロニクス講演会2012,2A1-Q03,浜松,2012.5.27-29. |
|
[4] |
中村 優介,高野 渉,中村 仁彦,“筋活動度データベースと統計的運動認識を利用した筋張力推定”,日本機械学会ロボティクスメカトロニクス講演会2011,2P2-O08,岡山,2011.5.27-28 . |
|
|
|