|
 |
研究成果|自然言語と身体運動感覚でコミュニケーションするヒューマノイドの開発
自然言語と身体運動を結びつけるヒューマノイドロボットの統計的情報処理を開発してきた.これは,人間の運動を言語として理解し,身体運動を表出して環境に変化をもたらし新たな知覚・情報を生み出すロボットのコミュニケーションの根幹をなす.特に,表出される身体運動には,環境に依存した幾何学・力学的拘束条件を満足することが求められる.身体運動モデルから運動を生成する従来の計算では,生成される運動は学習した運動の平均的・代表的なものにならざるを得ない.また,拘束条件を満足するような大自由度系のヒューマノイドロボットの運動を計画する計算法では,運動軌道を探索する空間が広く,膨大な計算コストが掛かる問題がある.
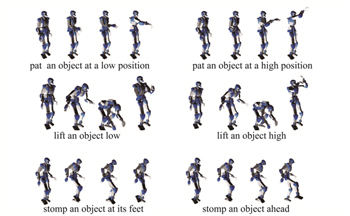
本研究では,記憶した運動を知識として利用しながら拘束条件を満足する計算法を開発した.環境中の障害物を避けながら動きを生成する計算法として,ヒューマノイドロボットのコンフィギュレーション空間上に障害物と接触しないようなランダムな点を配置して,その点を繋ぐことによって木構造を作成するRapidly exploring Random Tree (RRT)と,その点を配置する領域を記憶した運動の近傍になるようにバイアスを掛ける処理を組み合わせた方法を考案した.これは,高次元空間におけるRRTを用いた運動計画の問題であった計算コストに関して,記憶した運動を用いて木構造を伸ばす領域を限定することで,探索空間を狭め計算負荷を低減することができる.また,目標となる身体の位置・姿勢を満足する動きを生成する計算法として,拘束条件として付与された動きとの誤差および記憶した運動の記号から生成される確率を重ね合わせた評価関数を設計し,その評価関数が最小となる運動軌道を計算するアルゴリズムを考案した.
これによって,環境から決まってくる様々な条件を満たしながら,記憶と類似した身体運動を生成することが可能なる.環境中の物体操作のみならず人間が直感的に理解できる自然な動きを計算する技術は,人間および環境とコミュニケーションするヒューマノイドロボットの基礎となる.
|
[1] |
森谷 敏雄, 高野 渉, 中村 仁彦,“HMMが探索誘導するRRT法とそのヒューマノイドロボットの運動計画への応用”,第30回日本ロボット学会学術講演会,4N1-5, 北海道,2012.9.17-20. |
|
[2] |
高野 渉, 中村 仁彦,“統計的運動記憶とタスク拘束を満足するヒューマノイドロボットの全身運動計画”,日本機械学会ロボティクスメカトロニクス講演会2013 |
|
|
|