|
 |
研究成果|ヒューマノイド歩行パターンの生成,計画,安定化のためのエネルギーコスト最小化問題の求積法
本研究テーマでは,ヒューマノイドロボットのためのパターン生成の技術を開発した.従来の研究では,境界値問題を解決するためにモデル予測制御理論や境界緩和法を用いている.しかし固定境界条件や計算の複雑さのために,これらのパターン生成法に外乱への応答性を付加することは困難である.応答性は未知の環境において作業する脚型システムの主要機能である.
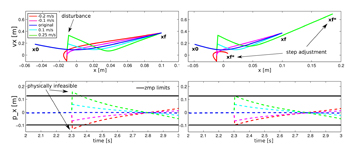
本研究では,限られた入力のもとに物理的整合性のある状態の遷移を実現するという観点からこの問題を解析した.衝撃時においてトルクの不連続性が許容される場合,状態遷移は解析的に解くことができる最適式の形で得られる.ZMP(Zero Moment Point)は目標状態遷移であるため,目標ZMP(Zero Moment Point)軌跡を指示する必要はない.
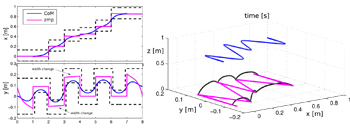
脚のシステムの線形ダイナミクスの特性は,各ステップのコストを最小化するための接続条件を見つけるために用いられる.これらの条件下では,低い入力値で任意の歩行動作を生成し,実行可能なステップ領域を得ることが可能である.
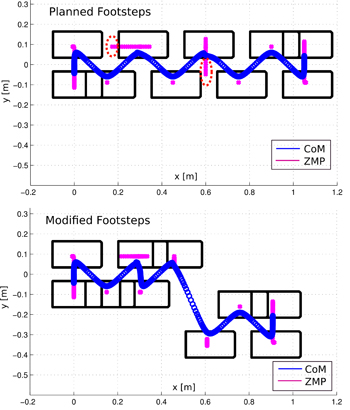
歩行時に外乱が加えられた場合,外乱を吸収するために元の軌道はリアルタイムで再計画される.システムの現在のCoM(Center of Mass)の状態に基づき,新しい到達可能な最終状態を探索する制御戦略は適応ステッピングのフレームワークで定式化される.
ダイナミクスの離散化が必要ないため,制御システム全体は計算的に高速で効率的である.提案する運動生成のフレームワークはヒトと同サイズのヒューマノイドロボットHRP-4を用いてシミュレーション環境及び実環境で検証を行った.
|
[1] |
C. Santacruz and Y. Nakamura, "Reactive Stepping Strategies for Bipedal
Walking based on Neutral Point and Boundary Condition Optimization" , in IEEE
International Conference on Robotics and Automation (ICRA), Karlsruhe,
Germany, accepted for publication, 2013.
|
|
[2] |
C. Santacruz and Y. Nakamura, "Analytical Real-time Pattern Generation for
Trajectory Modification and Foot-Step Replanning of Humanoid Robots", in
IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Vilamoura,
Portugal, pp. 2095-2100, 2012. |
|
[3] |
C. Santacruz and Y. Nakamura, "Walking Motion of Humanoid Robots: Connection of
Orbital Energy Trajectorias via Minimal Energy Control", in IEEE/RAS
International Conference on Humanoid Robots (Humanoids), Bled, Slovenia, pp.
695-700, 2011. |
|
[4] |
C. Santacruz and Y. Nakamura, "Motion Generation for Biped Robots Based on
Minimal Energy Control" , in Proceedings of the International Federation for
the Promotion of Mechanism and Machine Science (IFToMM), Guanajuato, Mexico,
A12_461, 2011. |
|
|
|