|
 |
研究成果|自己とモノ,自己と他者の間の関係性コーパスの構築
他者の行動や意図を推測・理解し,その行動までも制御しようとする社会性の能力は,知能の根源である.物を理解するはたらきや抽象的な論理思考は,行動を理解する機能を基に築かれていく.ミラーニューロンは,まさに他者の行動を自分に重ね合わせることによって,他者を模倣し,意図を推定し,感情を共感するメカニズムに深く関与している.我々は,これまで人間の身体運動を統計モデルによって記号として記憶し,他者の行動を記憶した記号と照らし合わせてその行動を理解でき,記号から運動を生成できるヒューマノイドロボットの知能を構築してきた.
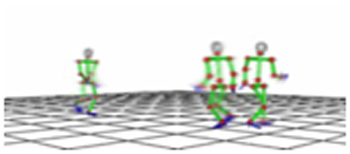
本研究では,この知能の枠組みを拡張して,自己の運動と他者の運動を統計モデルに学習して記号化する方法論,およびこの自己と他者の関係性の記号を用いて他者の行動を深読みする計算論を確立した[1][2].この記号を用いることによって,自己の運動の結果として生まれてくる他者の運動が推測できる.さらに,この記号を他者の内部情報処理に当てはめることによって,他者が他者自身の運動の結果として自己の運動を推論し,その推論された自己の運動の結果として他者の運動を予測できる.このように,同一の記号を再帰的に処理することによって他者の行動を深読みして,それに応じて自己の行動を決定することが可能となる.この枠組みの有効性を複数のヒューマノイドロボットが交差しながら歩行して目的地に到達するシミュレーションによって確認した.各ヒューマノイドロボットが,他者の推論の深さを推定しながら衝突しないように行動決定することによって,立ち止まったり,左右に歩行を変えることでスムーズな交差歩行が実現できた.これは,単独でロボットが歩行する現在から,渋谷のスクランブル交差点をヒューマノイドロボットが闊歩する社会へと切り開く知能である.また,他者の推論を読み解くことは,他者にある種のこころがあるということをロボットが理解した前提に立っており,ロボットを通じた「こころの理論」への展開が期待される技術である.
|
[1] |
川辺 直人,高野 渉,中村 仁彦,“記号化された運動と自然言語の相互連想モデルとコミュニケーションへの応用”,第24回人工知能学会全国大会,1J1-OS13-8,長崎,2010.6.9-11. |
|
[2] |
上段 達人,高野 渉,中村 仁彦,“すれ違いインタラクションを推論しながら群集をすり抜けるヒューマノイドロボット”,日本機械学会ロボティクスメカトロニクス講演会2011,2A1-D05,岡山,2011.5.27-28. |
|
|
|