|
 |
�������ʁb�q���[�}�m�C�h�ƃq�g�̗͊w�p�����[�^�̓���
�{�����e�[�}�ł́A�q���[�}�m�C�h���{�b�g��l�Ȃǂ̋r�ړ��V�X�e���S�ʂɑ�
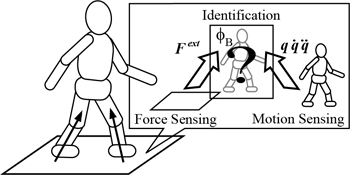
���āC���ʁE�d�S�E�����e���\���Ȃǂ̗͊w�p�����[�^�肷��Z�p���J�������D�q���[�}�m�C�h�����͂̊���l�ԂƐڐG���Ȃ���^�X�N���s���Ƃ����������\�ȉ^���\�͂����������ŁC���x�̍������͊w���f���Ɋ�Â��^������͋ɂ߂ďd�v�ƂȂ�D�܂��l�̉^����͂ɂ����āC�e�l���Ƃ̓����⍷�قx�ǂ����߂��ŁC�l�̐l�̗͊w���f���̊ȈՓI���� �N�P�Ȍv���Z�p�͋ɂ߂ėL�p�ł���D
���{�b�g�̗͊w�p�����[�^�̓���Z�p��1980�N�ォ�琷��Ɍ�������C�Z�p�Ƃ��Ăقڊm�����Ă���D��ʓI�ɂ͓���������ŁC���{�b�g�̑S�Ă̊ߊp�x�Ɗ߃g���N�̌v����K�v�Ƃ���D�����������̋Z�p�́C�y�䂪�Œ肳�ꂽ�Ꭹ�R�x�̎Y�Ɨp�}�j�s�����[�^��ΏۂƂ��Ă���D����C�r�ړ��V�X�e���́C�@���ɌŒ肳��Ă��炸�C�A�厩�R�x�ł���C�B�S�Ă̊߃g���N�̌v��������Ȃ��߁C�����̎�@�ł̓���͍���ł���.
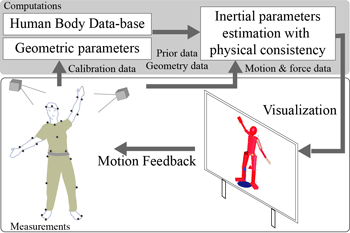
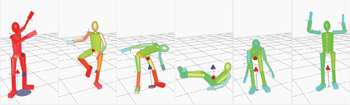
�r�ړ��V�X�e���̃����N�@�\��؍\���ŕ\�������ꍇ�C���̍��{(�x�[�X�����N)�̉^���������݂̂���C�S�g�̗͊w�p�����[�^������ł��邱�Ƃ��ؖ�����[1]�D���̏ؖ��Ɋ�Â��C�x�[�X�����N�̓��莮�𗘗p���āC�߃g���N����،v�������ɁC�ߊp�x�ƃV�X�e���ɓ����O�͂̌v���݂̂���C�S�g�̃p�����[�^�肷���@���J������[2]�D�����āC���肳�ꂽ�p�����[�^���C�Ⴆ�Ύ��ʂ����ȂǂƂ������C�����I��������K����������@���J������[3]�D�����I���������l�������œK���́C���R�x�̑����Ƌ��Ɍv�Z�ʂ������I�ɑ��傷��D�{��@�ł͓ʑ��ʑ̗��_�𗘗p���āC���̂�L���̎��_�W���ŕ\�����邱�ƂŁC�v�Z�ʂ�啝�ɒጸ���Ă���D���̌v�Z�����𗘗p���āC�l�̗͊w�p�����[�^�����A���^�C���œ��肵�āC���茋�ʂ����o�I�ɕ\������V�X�e�����J������[4]�D�팱�҂͑傫�ȃX�N���[���̑O�ŁC���[�V�����L���v�`��������Ȃ��珰���͌v�̏�ʼn^�����邾���ł悢�D�X�N���[����ɂ͎�����͂����l�̃��f�������e����C���肳��Ă��镔��(�ΐF)�Ƃ����łȂ�����(�ԐF)����ڂŕ�����悤�ɐF�Â�����D�팱�҂͐Ԃ��F�Â������ʂ��������ŁC�p�����[�^�̓���ɕK�v�ȉ^���ϓI�ɐ����ł���D�S�Ă̐F���ΐF�ɐ��܂�C���̌v�����ł� �e���ʂ̎��ʁE�d�S�E�����e���\����m�邱�Ƃ��o����D
|
[1] |
Ko Ayusawa, Gentiane Venture and Yoshihiko Nakamura: �gSymbolic Proof of Inertia-Parameter Identifiability of Legged Mechanisms fromUn-actuated Base-Link Dynamics�h, Proceedings of the 15th IFAC Symposiumon Systems Identification, pp.693-698, Saint-Malo, France, 2009. |
|
[2] |
���V�@��,�x���`���[�E�W�F���`����,�����@�m�F,�h�x�[�X�����N�̉^���������𗘗p�����r�^���{�b�g�̍ŏ��͊w�p�����[�^�̓���h, ���{���{�b�g�w�, Vol.27, No.9, pp.1066-1077, 2009. |
|
[3] |
Ko Ayusawa and Yoshihiko Nakamura: �gIdentification of Standard
Inertial Parameters for Large-DOF Robots Considering Physical
Consistency�h, Proceedings of the 2010 IEEE/RSJ International Conference
on Intelligent Robots and Systems, pp.6194-6201, Taipei, Taiwan, 2010. |
|
[4] |
Ko Ayusawa, Gentiane Venture and Yoshihiko Nakamura: �gReal-time
Implementation of Physically Consistent Identification of Human Body
Segments�h, Proceedings of the 2011 IEEE International Conference on
Robotics and Automation, pp.6282-6287, Shanghai, China, 2011. |
|
|
|