|
 |
研究成果|人間の深部身体感覚の推定とその構造化
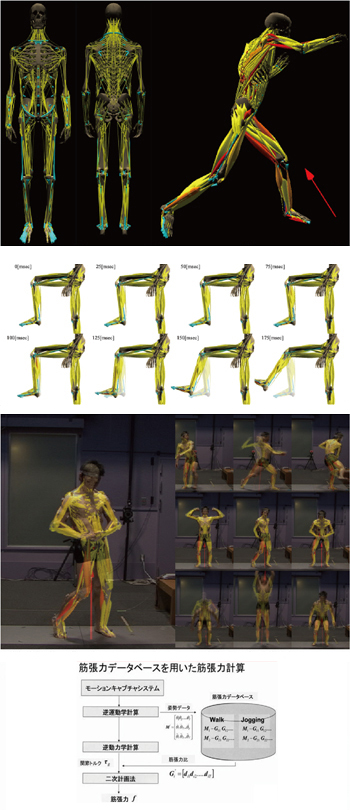
人間と共棲・共同作業するヒューマノイドを創りだすには,人間の深部身体感覚の推定技術は必要不可欠である.我々は,解剖学的な知見に基づき人間の筋骨格モデル及び神経筋ネットワークモデルを構築し,ロボティクスの分野で開発された運動・動力学計算プラットフォームをもとに,人間の深部身体感覚である筋張力の推定を行った.
神経筋ネットワークは人間の末梢神経系を表す.解剖学に基づいてネットワークを構築し,人間の運動データを用いてパラメータを同定することで,人間と同様の体性反射を実現するネットワークを構築した[1].
また,協同筋のグルーピングやEMG・生理学的筋モデルを積極的に用い,筋張力推定の計算アルゴリズムを改良することで1秒間に16フレームの筋張力推定および可視化を可能にした[2].これはスポーツやリハビリテーションで有効と言われるバイオフィードバックを可能にする.
そして,推定された筋活動度のデータベースを構築し,それを活用することでEMGを用いずとも適当な筋活動度の推定を可能にした[3].
本研究の成果により,人間の運動・感覚計測,深部感覚の推定およびそのデータベース化のための技術が確立されたと考えられる.実際,本プロジェクトの他のテーマでもこれらの成果が活用されているだけでなく,モーションキャプチャから筋張力推定のためのソフトウェアやバイオフィードバックのためのアプリケーションとして実用化されている.
|
[1] |
A. Murai, K. Yamane, and Y. Nakamura, Modeling and Identification of Human Neuromusculoskeletal Network Based on Biomechanical Property of Muscle, The 30th IEEE EMBS Annual International Conference, 2008.8.20-24, British Columbia, Canada,
|
|
[2] |
Akihiko Murai, Kosuke Kurosaki, Katsu Yamane, Yoshihiko Nakamura, Musculoskeletal-see-through mirror: Computational Modeling and Algorithm for Whole-Body Muscle Activity Visualization in Real Time, Progress in Biophysics and Molecular Biology, 有, Vol.103, 2010, 310-317, |
|
[3] |
中村 優介,高野 渉,中村 仁彦,“筋活動度データベースと統計的運動認識を利用した筋張力推定”,日本機械学会ロボティクスメカトロニクス講演会2011,2P2-O08,岡山,2011.5.27-28 . |
|
|
|