|
|
|
|
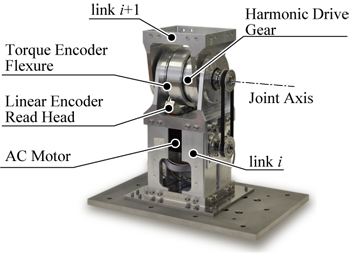
研究成果|ヒトとロボットのインタラクションのための基礎技術 人とロボットが真にコミュニケーションを行うには身体接触を前提としなければならない.しかしながら,これまで多く研究されてきたロボットは目標軌道に追従するものであり,身体接触に適しているとは言えなかった.本研究では人とロボットが接触を伴うインタラクションを行うための基礎技術を駆動系の力感受性という観点から研究した. 力センシングの研究 ロボットに働く関節力であるトルクを計測するにはトルクセンサを用いる.トルクセンサは一般に起歪体(ばね)の変形を計測することで行われる.通常用いられる方法は起歪体に作用する応力を歪ゲージを用いて歪の次元で計測するもの[1,2]である.ところが,歪ゲージを用いた計測はS/N比が悪く,感度のよい測定をするには起歪体の剛性を低くする必要がある.しかし,剛性の低下は共振周波数の低下を来たし,ロボットの運動性能を劣化させる. 本研究では,運動性能と測定感度の両立を図るため,トルクエンコーダを開発した.トルクエンコーダでは測定に高分解能リニアエンコーダを用いることで,S/N比7倍に改善した.さらに,局所的に歪,すなわち応力が集中する構造を持つ起歪体を用いる歪ゲージ測定法に対し,トルクエンコーダは起歪体全体の変形量を測定するため,応力集中部を必要とせず,起歪体の強度も向上できる. トルクエンコーダに限らず,すべてのトルク測定法に言えることだが,トルク測定は関節に作用する6軸力のうち回転軸周りの力のみを抽出する.通常は回転周りの剛性がほかの5軸力に対する剛性よりも十分低いためにほかの5軸力の影響を受けずに測定を行うことができる.ところが,起歪体の剛性が上がるにつれ,測定方向とそれ以外の方向の剛性に大きな差がなくなってくる.このとき,測定方向以外の5軸力の影響が測定量に見えてくることになり,これをトルク測定におけるクロストークと呼ぶ. この,高剛性トルク測定法の本質的な問題を解決するため,本研究ではエンコーダの読み取り部とスケールの相対的な剛性を局所的に定義する閉リンク機構を提案した.この機構によりクロストークを85%抑制できることが確認された. バックドライバビリティを高めたアクチュエータとウェアラブルロボットへの応用 駆動系の力感受性を高めるには力計測能力だけではなく,駆動系のバックドライバビリティを高める必要がある.ところが,多くのロボットで用いられている歯車減速機では
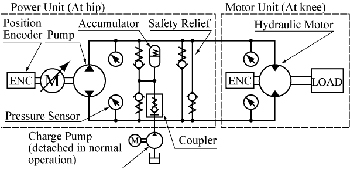
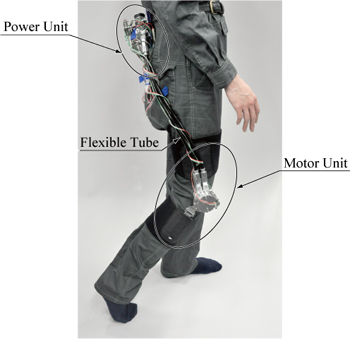
出力軸のバックドライバビリティを高める試みとしてはSEA (Series Elastic Actuator)[3] が用いられる.これは,減速機の出力とロボットのリンクの間に弾性要素を直列に入れることで減速機のバックドライバビリティに関わらず出力軸に自由度を与えるものである.ところがこの弾性は系の共振周波数を低下させるため制御を難しくする. そこで,本研究ではバックドライバビリティに優れるEHA(Electro-Hydrostatic Actuator:電気静油圧アクチュエータ)を開発し,それをロボットシステムに用いることにした.具体的には人の動作を支援するパワーアシストデバイスを開発し,ハードウェア的特性,人とロボットの強調動作に関する研究を行った.パワーアシストデバイスとしては人の基本的な行動単位である「起立→歩行→着座」を補助することを目的とし,補助対象関節はトルク要求の厳しい膝関節とした. 電気静油圧アクチュエータは油圧アクチュエータの一種であるが,制御弁を用いずにポンプの制御により油圧モータの制御を行う.正転,逆転の運動を可能にするために油圧回路はポンプと油圧モータを1対1でつなぐ閉回路とし,ポンプに接続されたサーボモータの回転がパスカルの原理と,モーメントアームの違いによるてこの原理により減速されることで出力側に伝達される.その意味で油圧回路で歯車減速機を置き換えていることに相当する.減速に伴う摩擦が少なく,バックドライバビリティを高めると同時に,従来の抵抗制御型の油圧に比べ大きな効率改善が見込まれる.一方で油圧駆動に変わりはなく,耐衝撃性や,油圧のモニタによる発揮トルク推定など,油圧駆動の特色も兼ね備える. 本研究ではEHAのこのような特色がウェアラブルロボットに適していることを見出し,高いバックドライバビリティを生かしたパワーアシスト制御系を開発した.実際に人が装着することでアシスト効果があることが確認され,ロボットと人が協調動作する制御系の研究を行った.
|
|
|||||||||||||||||
|
| 著作権について |